MotionSolve
This block performs co-simulation with Altair MotionSolve.
![]()
Library
CoSimulation
Description
The MotionSolve block implements co-simulation between Activate and Altair MotionSolve. The MotionSolve model acts as a plant. The model must be prepared by adding Control_PlantInput and Control_PlantOutput. These statements reference variables that are either used as inputs to the model, such as forces or torques, or measure outputs, such as displacements or velocities.
MotionSolve and MotionView (.xml, .mdl and .py) input format are supported. If the inputfile is a MotionView (.mdl), a conversion to (.xml) will be performed. From within the block parameter dialog it is possible to invoke MotionView to view and edit the MotionView model.
On output, if the action is active in the MotionSolve (.xml) model, the results (.mrf) will be converted into an H3D file (.h3d).
Simulations with this block require that Altair MotionSolve solver is installed. The path to the solver and its licensing must be set within Activate preferences panel, section CoSimulation.
Unlike in MotionSolveSignals block, input and output ports of this block are vectors. The name of each vector in the MotionSolve model are displayed as port labels.
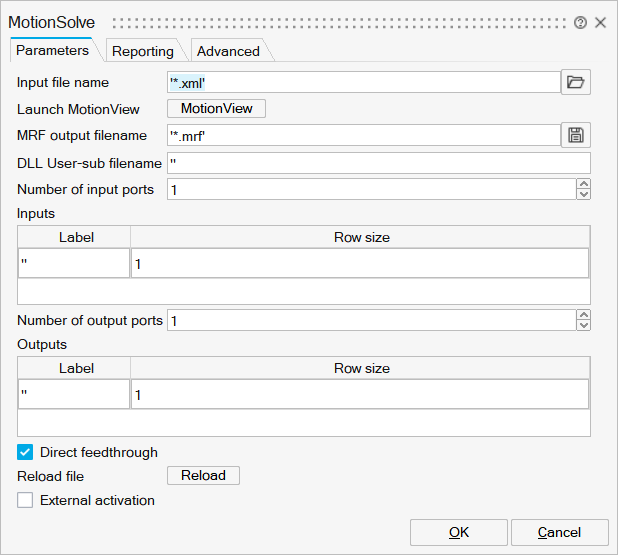
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
xml | Input file name | MotionSolve or MotionView model file name | String | |
mrf | MRF output filename | MotionSolve ouptut filename (.mrf) | String | |
usub | DLL User-sub filename | String | ||
nin | Number of input ports | The number of input ports on this block must correspond to the number of Control_PlantInput statements in the model. This field is automatically filled if the Reload button is pressed. | Number | |
inports | Inputs | Structure | ||
inports/label | Label | Cell of strings | ||
inports/rowsize | Row size | The input ports can be vectorial, in this case the size of vector is given here. This field is automatically filled if the Reload button is pressed. | Cell of scalars | |
nout | Number of output ports | The number of output ports on this block must correspond to the number of Control_PlantOutput statements in the model. This field is automatically filled if the Reload button is pressed. | Number | |
outports | Outputs | Structure | ||
outports/label | Label | Cell of strings | ||
outports/rowsize | Row size | The output ports can be vectorial, in this case the size of vector is given here. This field is automatically filled if the Reload button is pressed. | Cell of scalars | |
depu | Direct feedthrough | Sets the direct feedthough of the block to true to ensure that when MotionSolve is called, the block inputs are up to date. If an algebraic loop occurs, deselect this option. | Number | 0 |
externalActivation | External activation | Specifies if the block receives an external activation or inherits its activation through its regular input ports. If selected, an additional activation port is added to the block. By default, external activation is not selected. If External activation is selected, the communication with the MotionSolve simulation engine occurs only at event instants such as a fixed-rate event defined by an external clock. | Number | 0 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
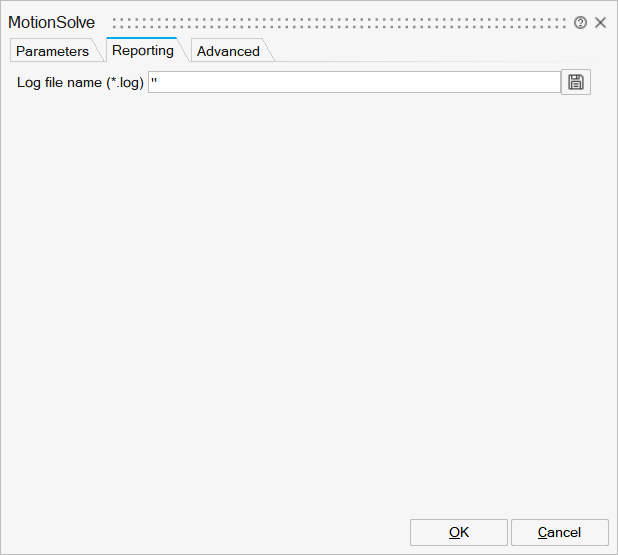
log_file_name | Log file name (*.log) | Activate messages as well as messages communicated from MotionSolve to Activate are logged into this file. | String |

| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
msip | MotionSolve server IP address | Used for TCP communication. Not used in the current release. | String | |
msport | MotionSolve server port number | Used for TCP communication. Not used in the current release. | Scalar | |
nEnvVar | Number of environment variables | Number of environment variables that are passed to MotionSolve. | Number | |
EnvVars | Environment Variables | Structure | ||
EnvVars/varname | Name | Name of the environment variable that is passed to MotionSolve. | Cell of strings | |
EnvVars/varvalue | Value | Value of the environment variable that is passed to MotionSolve. | Cell of strings |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
Port 1 | explicit | output | nout | |
Port 2 | explicit | input | nin | |
Port 3 | activation | input | externalActivation |
Advanced Properties
| Name | Value | Description |
|---|---|---|
always active | no | |
direct-feedthrough | Depends on block parameters | |
zero-crossing | no | |
mode | no | |
continuous-time state | yes | |
discrete-time state | no |