GearConstraint
Ideal 3-dim. gearbox (arbitrary shaft directions)
![]()
Library
Mechanics/MultiBody/Joints
Description
This ideal massless joint provides a gear constraint between
frames frame_a and frame_b. The axes of rotation
of frame_a and frame_b may be arbitrary.
Reference
Schweiger, Christian ;
Otter, Martin:
Modelling
3D Mechanical Effects of 1-dim. Powertrains. In: Proceedings of the 3rd International
Modelica Conference. Linköping : The Modelica Association and Linköping University,
November 3-4, 2003, pp. 149-158
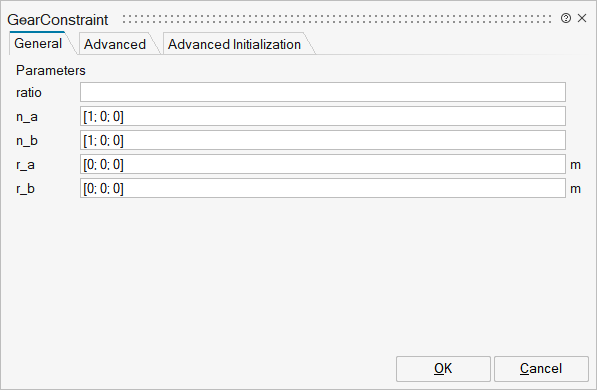
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_ratio | ratio | Gear speed ratio | Scalar | |
mo_n_a | n_a | Axis of rotation of shaft a (same coordinates in frame_a, frame_b, bearing) | Vector of size 3 | |
mo_n_b | n_b | Axis of rotation of shaft b (same coordinates in frame_a, frame_b, bearing) | Vector of size 3 | |
mo_r_a | r_a | Vector from frame bearing to frame_a resolved in bearing | Vector of size 3 | |
mo_r_b | r_b | Vector from frame bearing to frame_b resolved in bearing | Vector of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
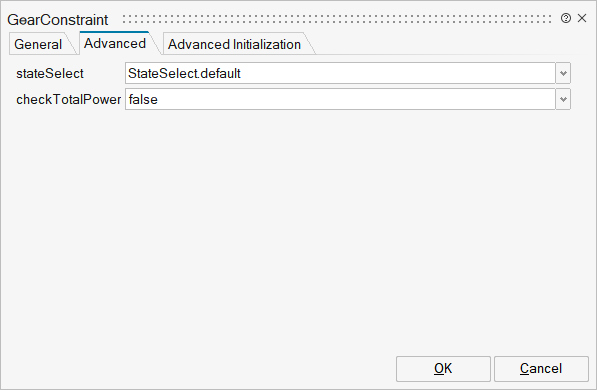
mo_stateSelect | stateSelect | Priority to use joint coordinates (phi_a, phi_b, w_a, w_b) as states | Structure | |
mo_stateSelect/choice1 | StateSelect.never | Number | 0 | |
mo_stateSelect/choice2 | StateSelect.avoid | Number | 0 | |
mo_stateSelect/choice3 | StateSelect.default | Number | 0 | |
mo_stateSelect/choice4 | StateSelect.prefer | Number | 0 | |
mo_stateSelect/choice5 | StateSelect.always | Number | 0 | |
mo_checkTotalPower | checkTotalPower | = true, if total power flowing into this component shall be determined (must be zero) | Scalar | true |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
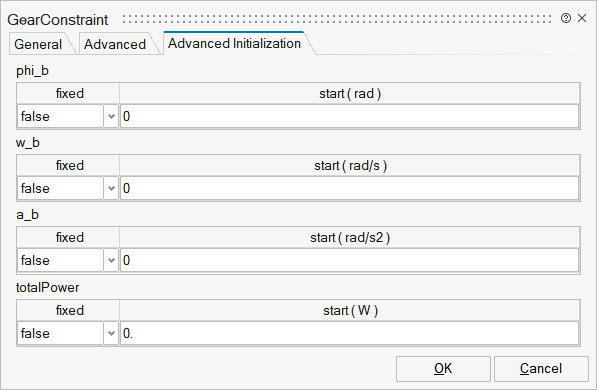
mo_phi_b | phi_b | phi_b | Structure | |
mo_phi_b/fixed | fixed | Cell of scalars | true | |
mo_phi_b/start | start | Cell of scalars | ||
mo_w_b | w_b | w_b | Structure | |
mo_w_b/fixed | fixed | Cell of scalars | true | |
mo_w_b/start | start | Cell of scalars | ||
mo_a_b | a_b | a_b | Structure | |
mo_a_b/fixed | fixed | Cell of scalars | true | |
mo_a_b/start | start | Cell of scalars | ||
mo_totalPower | totalPower | totalPower | Structure | |
mo_totalPower/fixed | fixed | Cell of scalars | true | |
mo_totalPower/start | start | Cell of scalars | ||
mo_actuatedRevolute_a | actuatedRevolute_a | actuatedRevolute_a | Structure | |
mo_actuatedRevolute_a/fixed | fixed | Cell of scalars | ||
mo_actuatedRevolute_b | actuatedRevolute_b | actuatedRevolute_b | Structure | |
mo_actuatedRevolute_b/fixed | fixed | Cell of scalars |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system a fixed to the component with one cut-force and cut-torque | input | 1 |
frame_b | implicit | Coordinate system b fixed to the component with one cut-force and cut-torque | output | 1 |
bearing | implicit | Coordinate system fixed in the bearing | input | 2 |