SlewRateLimiter
Limits the slew rate of a signal
![]()
Library
Blocks/Nonlinear
Description
The SlewRateLimiter block limits the slew rate of its input signal in the range of [Falling, Rising].
To ensure this for arbitrary inputs and in order to produce a differential output, the input is numerically differentiated
with derivative time constant Td. Smaller time constant Td means nearer ideal derivative.
Note: The user has to choose the derivative time constant according to the nature of the input signal.
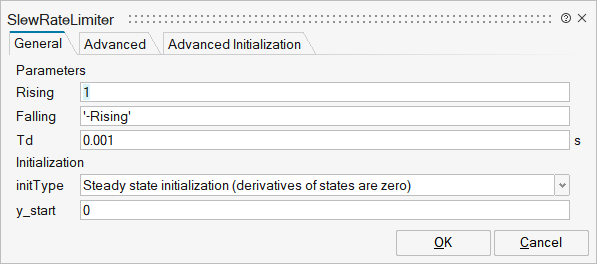
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_Rising | Rising | Maximum rising slew rate [+small..+inf) [1/s] | Scalar | |
mo_Falling | Falling | Maximum falling slew rate (-inf..-small] [1/s] | Scalar | |
mo_Td | Td | Derivative time constant | Scalar | |
mo_initType | initType | Type of initialization (SteadyState implies y = u) | Structure | |
mo_initType/choice1 | No initialization (start values are used as guess values with fixed=false) | Number | 0 | |
mo_initType/choice2 | Steady state initialization (derivatives of states are zero) | Number | 0 | |
mo_initType/choice3 | Initialization with initial states | Number | 0 | |
mo_initType/choice4 | Initialization with initial outputs (and steady state of the states if possible) | Number | 0 | |
mo_y_start | y_start | Initial or guess value of output (= state) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
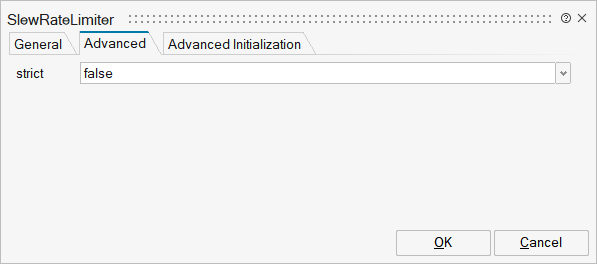
mo_strict | strict | = true, if strict limits with noEvent(..) | Scalar | true |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
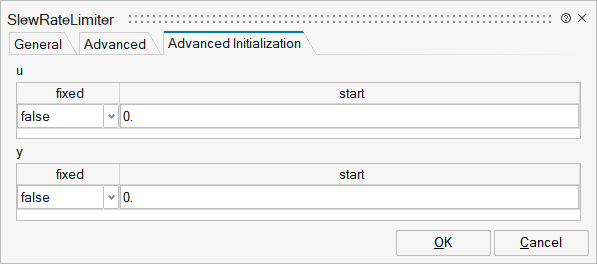
mo_u | u | u | Structure | |
mo_u/fixed | fixed | Cell of scalars | true | |
mo_u/start | start | Cell of scalars | ||
mo_y | y | y | Structure | |
mo_y/fixed | fixed | Cell of scalars | true | |
mo_y/start | start | Cell of scalars |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
u | implicit | Connector of Real input signal | input | 1 |
y | implicit | Connector of Real output signal | output | 1 |