BodyShape
Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states)
![]()
Library
Mechanics/MultiBody/Parts
Description
Rigid body with mass and inertia tensor and two frame connectors. All parameter vectors have to be resolved in frame_a. The inertia tensor has to be defined with respect to a coordinate system that is parallel to frame_a with the origin at the center of mass of the body. The coordinate system frame_b is always parallel to frame_a.
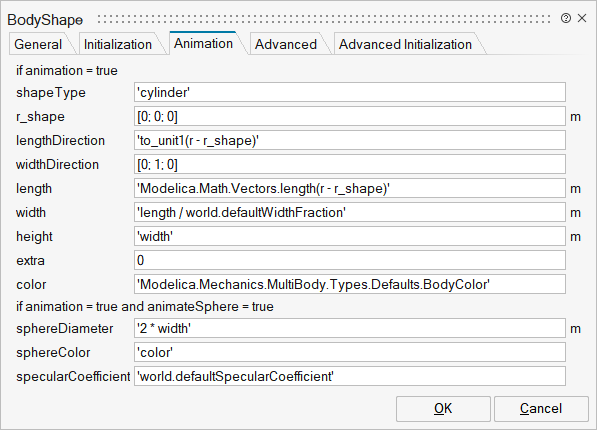
By default, this component is visualized by any shape that can be defined with Modelica.Mechanics.MultiBody.Visualizers.FixedShape. This shape is placed between frame_a and frame_b (default: length(shape) = Frames.length(r)). Additionally a sphere may be visualized that has its center at the center of mass. Note, that the animation may be switched off via parameter animation = false.
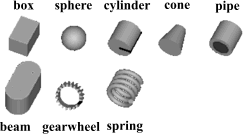
The following shapes can be defined via parameter shapeType, e.g., shapeType="cone":
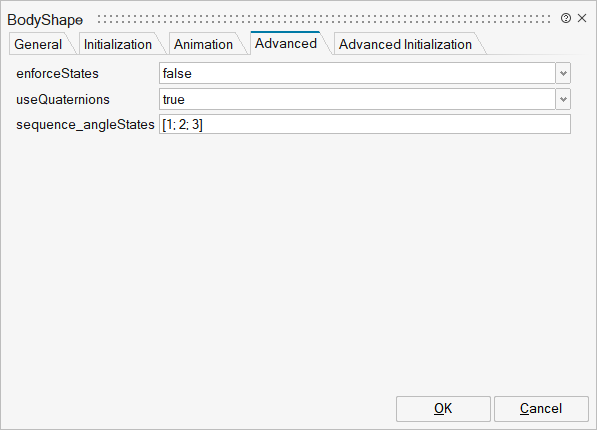
A BodyShape component has potential states. For details of these states and of the "Advanced" menu parameters, see model MultiBody.Parts.Body.
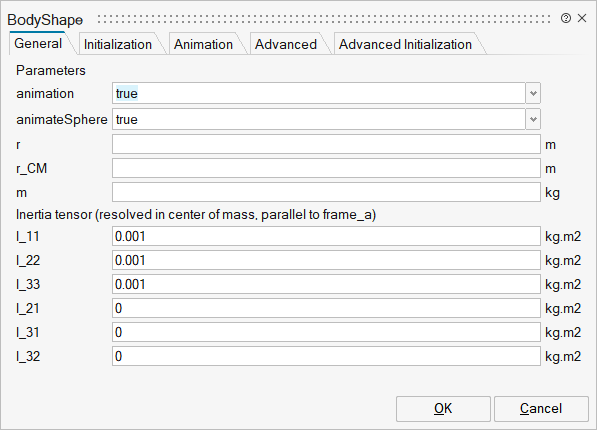
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_animation | animation | = true, if animation shall be enabled (show shape between frame_a and frame_b and optionally a sphere at the center of mass) | Scalar | true |
mo_animateSphere | animateSphere | = true, if mass shall be animated as sphere provided animation=true | Scalar | true |
mo_r | r | Vector from frame_a to frame_b resolved in frame_a | Vector of size 3 | |
mo_r_CM | r_CM | Vector from frame_a to center of mass, resolved in frame_a | Vector of size 3 | |
mo_m | m | Mass of rigid body | Scalar | |
mo_I_11 | I_11 | (1,1) element of inertia tensor | Scalar | |
mo_I_22 | I_22 | (2,2) element of inertia tensor | Scalar | |
mo_I_33 | I_33 | (3,3) element of inertia tensor | Scalar | |
mo_I_21 | I_21 | (2,1) element of inertia tensor | Scalar | |
mo_I_31 | I_31 | (3,1) element of inertia tensor | Scalar | |
mo_I_32 | I_32 | (3,2) element of inertia tensor | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
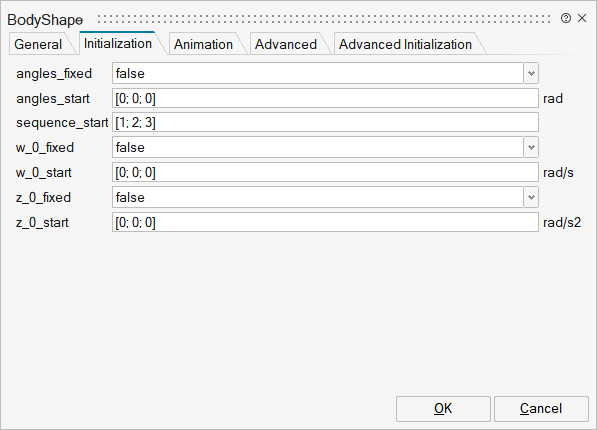
mo_angles_fixed | angles_fixed | = true, if angles_start are used as initial values, else as guess values | Scalar | true |
mo_angles_start | angles_start | Initial values of angles to rotate frame_a around 'sequence_start' axes into frame_b | Vector of size 3 | |
mo_sequence_start | sequence_start | Sequence of rotations to rotate frame_a into frame_b at initial time | Vector of size 3 | |
mo_w_0_fixed | w_0_fixed | = true, if w_0_start are used as initial values, else as guess values | Scalar | true |
mo_w_0_start | w_0_start | Initial or guess values of angular velocity of frame_a resolved in world frame | Vector of size 3 | |
mo_z_0_fixed | z_0_fixed | = true, if z_0_start are used as initial values, else as guess values | Scalar | true |
mo_z_0_start | z_0_start | Initial values of angular acceleration z_0 = der(w_0) | Vector of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_shapeType | shapeType | Type of shape | String | |
mo_r_shape | r_shape | Vector from frame_a to shape origin, resolved in frame_a | Vector of size 3 | |
mo_lengthDirection | lengthDirection | Vector in length direction of shape, resolved in frame_a | Vector of size 3 | |
mo_widthDirection | widthDirection | Vector in width direction of shape, resolved in frame_a | Vector of size 3 | |
mo_length | length | Length of shape | Scalar | |
mo_width | width | Width of shape | Scalar | |
mo_height | height | Height of shape | Scalar | |
mo_extra | extra | Additional parameter depending on shapeType (see docu of Visualizers.Advanced.Shape) | Scalar | |
mo_color | color | Color of shape | Vector of size 3 | |
mo_sphereDiameter | sphereDiameter | Diameter of sphere | Scalar | |
mo_sphereColor | sphereColor | Color of sphere of mass | Vector of size 3 | |
mo_specularCoefficient | specularCoefficient | Reflection of ambient light (= 0: light is completely absorbed) | Scalar |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_enforceStates | enforceStates | = true, if absolute variables of body object shall be used as states (StateSelect.always) | Scalar | true |
mo_useQuaternions | useQuaternions | = true, if quaternions shall be used as potential states otherwise use 3 angles as potential states | Scalar | true |
mo_sequence_angleStates | sequence_angleStates | Sequence of rotations to rotate world frame into frame_a around the 3 angles used as potential states | Vector of size 3 |
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
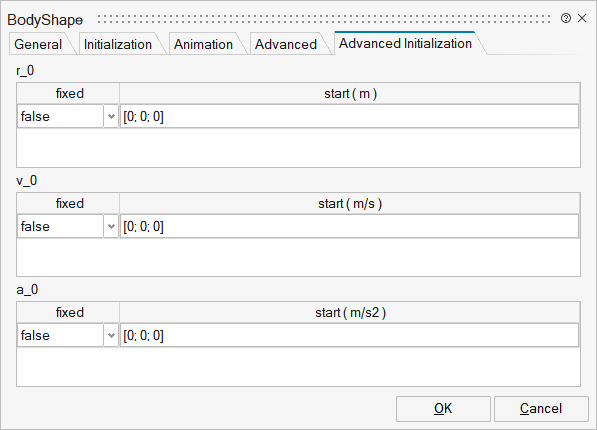
mo_r_0 | r_0 | r_0 | Structure | |
mo_r_0/fixed | fixed | Cell of vectors of size 3 | true | |
mo_r_0/start | start | Cell of vectors of size 3 | ||
mo_v_0 | v_0 | v_0 | Structure | |
mo_v_0/fixed | fixed | Cell of vectors of size 3 | true | |
mo_v_0/start | start | Cell of vectors of size 3 | ||
mo_a_0 | a_0 | a_0 | Structure | |
mo_a_0/fixed | fixed | Cell of vectors of size 3 | true | |
mo_a_0/start | start | Cell of vectors of size 3 |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
frame_a | implicit | Coordinate system fixed to the component with one cut-force and cut-torque | input | 1 |
frame_b | implicit | Coordinate system fixed to the component with one cut-force and cut-torque | output | 1 |