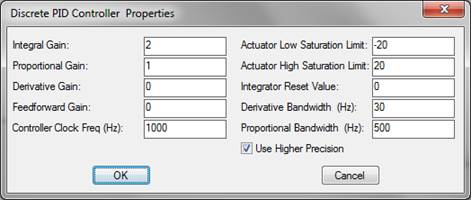
To configure the PID compensator, enter the following values into the PID Controller (Digital) block:
Since the feed forward and derivative gain are set to 0, the block is actually configured to operate as a PI controller. Saturation is set to limit the influence of the integral correction to )20 Hz. Proportional bandwidth is set at Nyquist frequency (½ the sampling frequency); derivative bandwidth does not matter in this controller. The Use Higher Precision parameter is turned ON to allow trapezoidal integration to be used.
Integral reset is not used on this controller, so a const block with a value of 0 is fed into PID Controller (Digital) to prevent integral reset. The actual values for the proportional and integral gain were determined experimentally in the final configuration to obtain minor overshoot and settling in the control.
This completes the construction of the Volts/Hz Controller compound block.