OPTIMIZATION
Specifies optimization is activated.
Type
AcuSolve Command
Syntax
OPTIMIZATION {parameters}
Qualifier
This command has no qualifier.
Parameters
- type (string) [="shape_optimization"]
- The type of optimization to be performed. Shape optimization requires
DESIGN_VARIABLE commands and topology optimization
requires one DESIGN_VARIABLES_FIELD command.
- shape_optimization
- Geometrical shape modification using morph shapes.
- parametric_optimization
- Optimization of model parameters (constants).
- topology_optimization
- Optimization of topological domain.
- objectives(string) [=""]
- The objectives parameter lists the objective functions used in optimization. If more than one objective is specified, Pareto optimization is assumed. The objectives are defined using the objective command.
- constraints(string) [=""]
- The constraints parameter lists the constraint functions used in optimization. The constraints are defined using the constraint command.
- optimizer_convergence_tolerance (real) >=0 [=1.e-4]
- The optimizer convergence tolerance is the tolerance for the optimization algorithm.
- optimizer_oscillation_control_factor (real) >=0 [=0.1]
- Optimizer oscillation control factor limits how the design optimization variables may oscillate. If a particular design variable increases a certain amount x during the previous optimization case, then this design variable is limited to decrease x multiplied by the optimizer_oscillation_control_factor for the current case. It will not limit the amount the design variable may increase. Vice versa, if a design variable decreases the previous case then there is no limit on how much it may continue to decrease, but there is a limit on how much it may increase.
- topology_optimizer (enumerated) [=method_of_moving_asymptotes]
- When type = topology_optimization, the method of moving asymptotes method is used as the optimization method to minimize the objective function.
Description
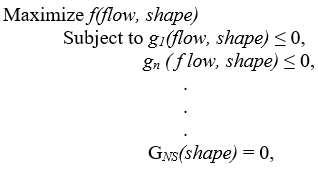
Figure 1.
where is a user defined objective function and are user defined constraints depending on the flow solution and the shape determined by the design optimization shape control variables. Further, = 0 denotes the equation system for the flow, including the Navier-Stokes equation for instance. This constraint is taken for granted below, and is not written out in the formulations.
A few commands related to the specification of the optimization problem itself are added to the command structure. In this section, objectives and constraints are defined under the optimization command umbrella, referring to solution related values that are specified in an objective and constraint commands for each such function. The optimization command also specifies the optimization solution method and strategy.
OPTIMIZATION {
objectives = { "Minimize_Pressure_Drop" }
constraints = { "Top_constraint" }
optimizer_convergence_tolerance = 1.0e-4
optimizer_oscillation_control_factor= 0.1
}OPTIMIZATION {
type
objectives
}