MV-1011:航空機の主着陸装置(ランディングギア)の上げ下げの解析
本チュートリアルでは、航空機の着陸装置の上げ下げを解析するためのシーケンシャルシミュレーションスクリプトの作成方法について学びます。
シーケンシャルシミュレーション
マルチボディモデルの全体的な動的挙動はしばしば複数のソリューションシーケンスで捕捉する必要があります。典型的な例:
- 一定時間の後にモデルのコンフィギュレーションが変わる。
- 1つのタイプの解析を別の解析の前に行う必要がある。例えば、動解析の前に静的ソリューションを要する。
- 複雑なモデルは単一のソルバー設定では解決しない場合がある。ソルバー設定は、全体のシミュレーションタイム内の一定期間の後、変更が必要な場合もある。
これらの条件は、上記のタイプのシーケンスを実行するコマンドのセットをソルバーに与えることでシミュレーションすることが可能です。このようなシミュレーションは、シーケンシャルシミュレーションと呼ばれます。一般的に、ソルバーは複数のソリューション(シミュレーション)コマンドを受けます。本演習では、そのようなシミュレーションシーケンスをどのように記述するかについて学習します。
演習
本演習では、着陸装置機構をその上げ下げについて解析します。シミュレーションのシーケンスは、一定の時間内に機構が引き上げられ、そこでシミュレーションが停止し、モデルのコンフィギュレーションは脚上げのために変更され、ソリューションは脚下げのために再度実行されるよう記述されなくてはなりません。
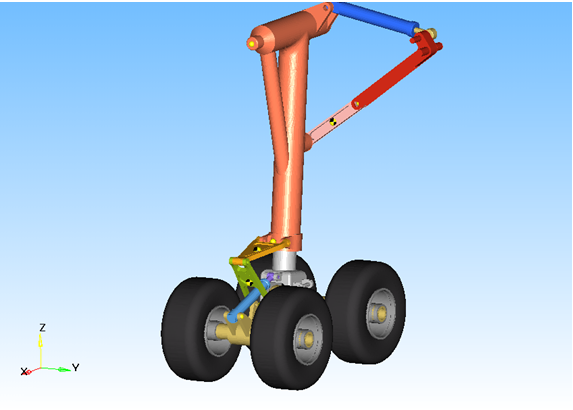
図 1. 航空機の主着陸装置
- MainLandingGear.mdl
- Aircraft_Structure.hm
- MainLandingGear_graphics.h3d
Phase 1
このフェイズでは、着陸装置の脚上げをシミュレーションするための着陸装置モデルを準備します。
着陸装置機構モデルを開く
本ステップでは着陸装置モデルを開き、航空機ボディのグラフィックを結合します。
-
ツールバーから、Open Model
 をクリックします。
をクリックします。
または
を選択してモデルを開きます。
-
Open modelダイアログからファイルMainLandingGear.mdlを選択し、Open(開く)をクリックします。
読み込まれたモデルは、下の図のように見えるはずです。ボディとジョイントについてモデルを確認してください。
このモデルは、ホイールを支えるシリンダーとピストンのリンク、および着陸装置を航空機のボディに上げ下げするリンクから成っています。また、航空機自体について定義されたボディも含まれますが、グラフィックスはありません。最初の手順として、航空機ボディのパートのグラフィックを追加し、表示されるようにします。
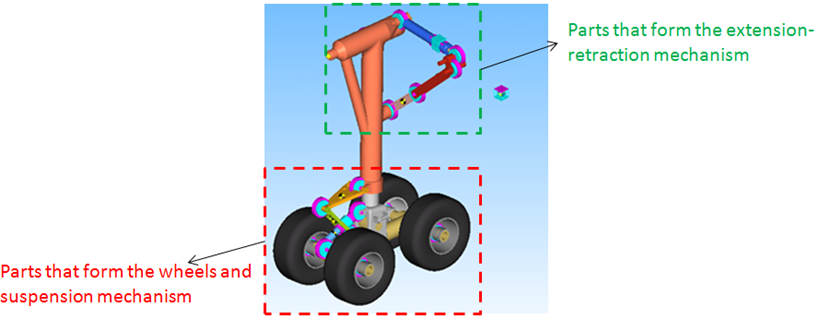
図 2. 主着陸装置の機構
航空機のボディのグラフィックを作成するには、HyperMeshファイルを使用します。
-
Input File
 をクリックし、入力ファイルとしてAircraft_Structure.hmを選択します。
をクリックし、入力ファイルとしてAircraft_Structure.hmを選択します。
-
MotionViewツールバー内のGraphics
 をクリックします。
をクリックします。
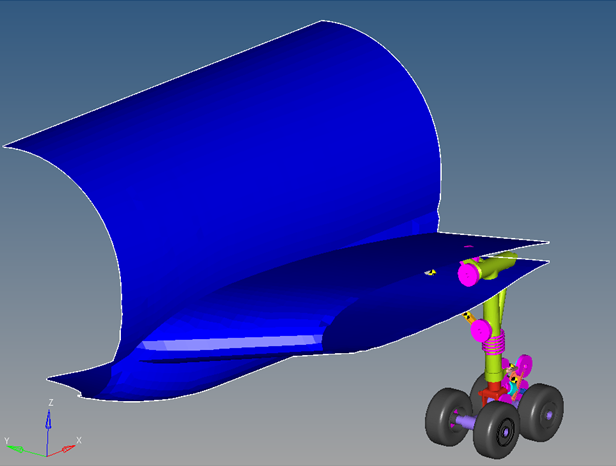
図 3. 航空機ボディのグラフィックをインポートした後のモデル -
Connectivityタブで:
-
Component listをAllにセットします。
注: H3Dファイルには aircraft_body という1つのコンポーネントしかないので、コンポーネントリストはAllに設定するか、ドロップダウンメニューから唯一のコンポーネントを選択することができます。

図 4.
-
Component listをAllにセットします。
着陸装置の脚上げの動きの定義
本ステップでは、着陸装置の脚上げのモーションを定義します。
-
ProjectブラウザでModelを右クリックし、を選択(またはツールバーからMotions
 を 右クリック)します。
を 右クリック)します。
-
JointにActivating CylinderとActivating Pistonの間に定義されたCylindrical Joint ActPis_ActCyl_Cyl(下の図参照)を選択します。
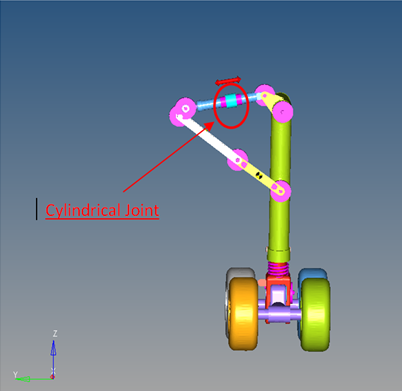
図 5. Rev joint(回転ジョイント) -
別のモーションを追加し、Aligning_Motionと名付けます。Jointに、ボディMLG CylとMLG
Pisの間に定義されたCylinderical JointとLnkCyl_LnkPis_Cyl(下の図参照)を選択します。
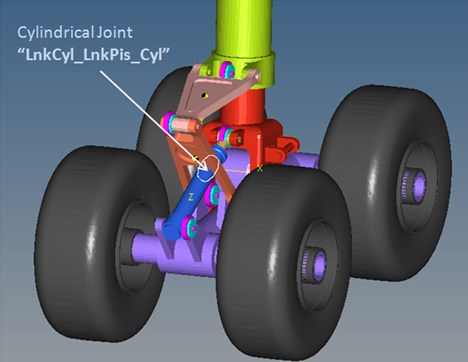
図 6. Translation Joint(並進ジョイント)
主着陸装置の脚上げをシミュレーションするための動解析の実行
本ステップでは、主着陸装置の過渡解析を実行します。
- Runパネルで、End timeを5秒に設定します。
- Save and run current model browserをクリックし、実行ファイルの名称lg_retract.xmlを入力します。Saveをクリックします。
- Runをクリックします。シミュレーションが完了したら、ソルバーウィンドウとメッセージログを閉じます。
- RunパネルでAnimateをクリックし、結果のアニメーションを確認します。
Phase 2
Phase 2では、主着陸装置の脚の上げ下げを解析するためのシーケンシャル シミュレーションを実行するTemplexテンプレートを書きます。
着陸装置の脚下げの動きの定義
本ステップでは、着陸装置の脚下げの動きをモデル化します。
-
ProjectブラウザでModelを右クリックし、を選択(またはツールバーからMotions を 右クリック)します。
- LabelをExtension Motion、Variable Nameをmot_extとして、別のモーションを追加します。着陸装置の脚上げ用のRetraction Motionで定義された同じジョイントを選択します。
- Propertiesタブで、モーションのタイプをExpressionに設定し、Expression欄にSTEP(TIME,5,-750,10,0)と入力します。
シーケンシャルシミュレーションを実行するためのテンプレートの定義
本ステップでは、シーケンシャルシミュレーションを実行するためのテンプレートを書きます。
-
ProjectブラウザでModelを右クリックし、を選択(またはツールバーからTemplate
 を 右クリック)します。
を 右クリック)します。
-
以下のとおりスクリプトを入力します。波括弧{}内のエントリは、Extension MotionまたはRetraction Motionのidstringを指します。このidstring属性には、Expression builder
 からもアクセスが可能です。
注: 以下のコマンドは、 XMLフォーマットのMotionSolveコマンドステートメントです。ソルバーはそれらのID番号を介してエンティティを参照するため、element_id値はモーションのIDに転換されます。モーションに下記のものと異なる変数名を使用すると、テキストも違ってくる場合があります。
からもアクセスが可能です。
注: 以下のコマンドは、 XMLフォーマットのMotionSolveコマンドステートメントです。ソルバーはそれらのID番号を介してエンティティを参照するため、element_id値はモーションのIDに転換されます。モーションに下記のものと異なる変数名を使用すると、テキストも違ってくる場合があります。<!--Deactivate the extension motion first --> <Deactivate element_type = "MOTION" element_id = "{MODEL.mot_ext.idstring}" /> <!--Simulate for 5 seconds --> <Simulate analysis_type = "Transient" end_time = "5.0" print_interval = "0.01" /> <!--Deactivate the retraction motion --> <Deactivate element_type = "MOTION" element_id = "{MODEL.mot_ret.idstring}" /> <!--Activate the extension motion that was deactivated during the first simulation --> <Activate element_type = "MOTION" element_id = "{MODEL.mot_ext.idstring}" /> <!--Simulate for 5 more seconds --> <Simulate analysis_type = "Transient" end_time = "10.0" print_interval = "0.01" /> <STOP/> <!-- Stop the simulation. Any further commands below this command will not be executed -->上記のスクリプトには5つのブロックが含まれています。- Block 1
- 着陸装置の脚下げを定義するモーションを非アクティブ化
- Block 2
- 着陸装置の脚上げについてモデルをシミュレーション
- Block 3
- 着陸装置の脚上げに使用されるモーションを非アクティブ化
- Block 4
- 着陸装置の脚下げを定義するモーションをアクティブ化
- Block 5
- 着陸装置の脚下げについてモデルをシミュレーション
最後のSimulateブロックで設定された時刻にシミュレーションを停止するには、Stopコマンドを使用します。
注: テンプレートは、MotionViewではサポートされていない可能性のあるジョイントやマーカーといったモデリングエンティティを、またはシミュレーションパラメータ、アクティブ化や非アクティブ化などのコマンドエンティティをソルバーデックに追加するために使用できます。MotionSolve XMLは下記の2つのセクションに分かれています。- Modelセクション
- すべてのモデル要素が定義されます。テンプレートからこのセクションを書くには、TypeにWrite text to Solver input deckを選択します。
- Commandセクション
- ソルバーシミュレーション用のコマンドが定義されます。テンプレートからこのセクションを書くには、TypeにWrite text to Solver command fileを選択します。
モデルのシミュレーションとアニメーション表示
本ステップでは、主着陸装置モデルの脚の上げ下げをシミュレーションするためにモデルを実行し、アニメーション表示します。
- Runパネルでファイル名をMLG_Simulation.xmlと指定し、Runをクリックします。
- シミュレーションが完了したら、HyperWorks Solver Viewウィンドウを閉じます。
- Animateをクリックし、アニメーションを確認します。
Phase 3
このフェイズでは出力リクエストを作成し、モデルを再実行して着陸装置のAngular DisplacementとAngular Velocity を計測します。
出力リクエストの作成とモデルの再実行
このフェイズでは出力リクエストを作成し、モデルを再実行して着陸装置のAngular DisplacementとAngular Velocity を計測します。
-
ProjectブラウザでModelを右クリックし、を選択(またはツールバーからOutputs
 を 右クリック)します。
を 右クリック)します。
-
これらの出力リクエストで解析を再実行し、生成されたPLTファイルからのリクエスト結果をHyperGraphでプロットします。

図 7.
図 8.