MotionSolveでのモデリング
モデリングのプロセスは、よりベーシックなコンポーネントのアセンブリとしてのシステムの理想化から始まります。
例えば、特定の条件下で、パワートレイン全体をいくつかの微分方程式に置き換えることが可能です。仮定をどのように簡易化するかの選択は、結果の有効性と検証、およびモデルを作成し保持するためのコストに重大な影響を与えかねません。したがって、物理モデルの現実的な理想化が大変重要となります。
意図する結果は、モデルの目的を定義します。対象とする物理的挙動、実行されるべきシミュレーション、必要な出力、必要とされる精度を、ユーザーは決定しなくてはなりません。モデルの目的が定義され、必要な複雑さの度合いが決定されたら、モデルは基本的コンポーネントの適切なセットに分解されます。分解は、モデル構築のためのcrawl-walk-runアプローチを可能にします。シンプルなモデルがまず構築され、テストされます。モデルの信頼性が高まるに従って、複雑さが徐々に追加されます。
MotionSolveは通常、シミュレーション用の機構モデルの指定に下記のデータを必要とします:
- コンポーネントの質量と慣性モーメント
- 各コンポーネントの重心の位置、システムを結合するジョイントの位置、特定の運動機能や力がかかるポイントなど、システムの幾何学的プロパティ
- パート間の接触が重要な場合のボディの幾何学的形状
- メカニカルジョイント、ハイペア接触、その他の拘束、および弾性要素について定義されたシステムの結合性(パートを結合するメカニズム)
- システムに作用している外力と励振の記述
慣性ベアリング要素(パート)は通常次のように表されます:
- 剛体
- 一般に3の並進自由度と3の回転自由度で表現されます。
- 弾性体
- 一般に区分モード合成を使用してモード領域内で表現されます。
- 質点
- 3の並進自由度で表現されます。
- 2D剛体
- 一般に2の並進自由度と1の回転自由度で表現されます。
- 2D/3D混合ボディ
- 例えば、ベルトのねじり動作が一般に着目の対象ではないベルトをモデリングするために使用されます。
システムを表現するパートが作成されたら、それらは互いに、もしくは全体座標系(通常地面)に拘束されなくてはなりません)。この目的のために、拘束の大規模なライブラリが用意されています。典型的な拘束は:
- 低次ペア標準ジョイント: 図 1 は、一般的に使用されるジョイントをいくつか示しています。物理的に、ロワーペアジョイントは、特定の方向のみの相対的並進および / または回転運動が可能な2つのあわせ面から成ります。これらの面は取り去られ、その関係性は、2つのボディ上の方向とポイント間の代数方程式のセットとして表されます。
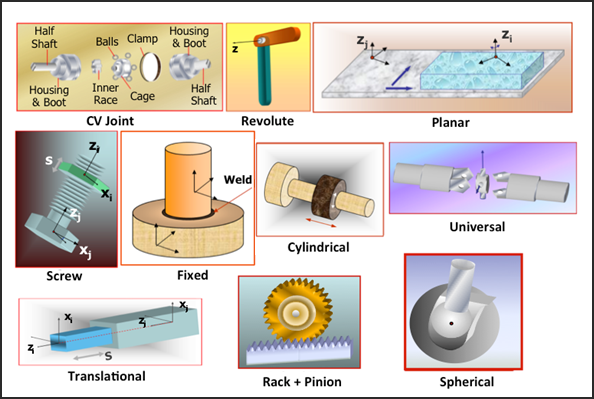
図 1. 低次ペアジョイントの例 - ジョイントプリミティブ: 固有の拘束関係を強化する抽象的なエンティティ。一般的に使用されるジョイントプリミティブについては、図 2をご参照ください。
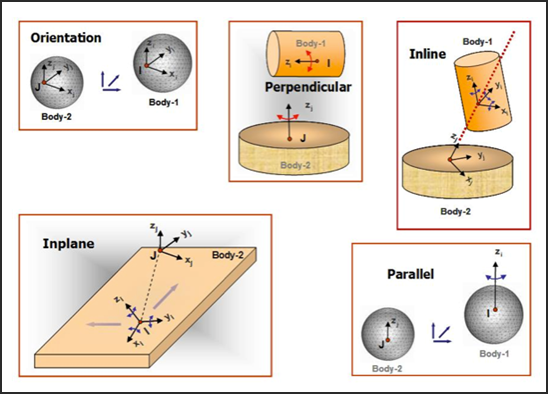
図 2. ジョイントプリミティブの例 - ハイペアジョイント: 曲線と面を含んだ拘束。ハイペアジョイント拘束の例としては、点-曲線、曲線-曲線、曲線-面および面-面が挙げられます。曲線と面は通常、パラメトリックに定義されます。図 3に例を示します。
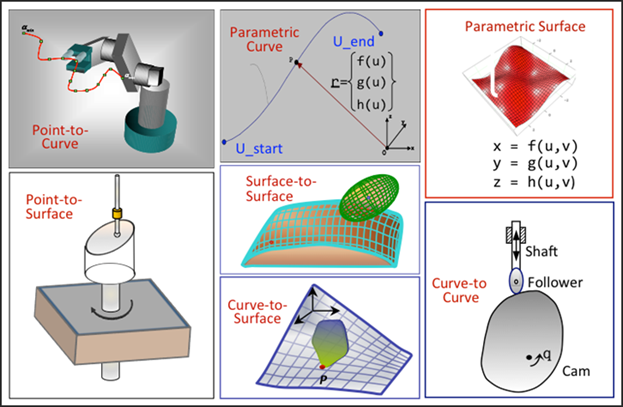
図 3. パラメトリックなカーブ、サーフェス、および高次ペアジョイントの例 - モーション、カプラー、およびギア拘束: モーション拘束は、モデル内の2つの座標系間の入力の加振を定義します。モーションの入力は、並進または回転であり得ます。式は、モーションの特徴を定義します。カプラー拘束は、2つまたは3つのジョイントの自由度間の代数的な関係を定義します。この拘束は、理想化された平歯車、ラックアンドピニオンギア、差動装置、油圧シリンダーのモデル化に使用されます。これらの一般的な例については、図 4をご参照ください。
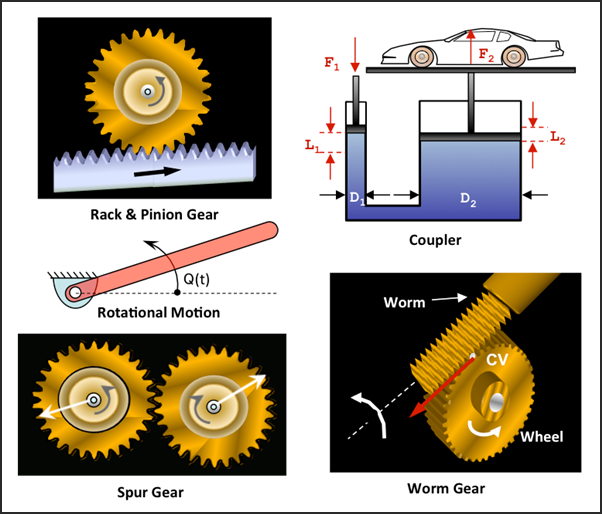
図 4. モーション、カプラー、およびギア要素の例 - フォースおよびフレキシブルな結合: パートは拘束のみならず、フォース要素によっても結合され得ます。拘束はシステム内の代数的な関係を定義し、これらはワークレスな理想化された結合を表します。一方、フレキシブルな結合は、フォース要素と共にモデル化されます。フォース要素は2つ以上のパート間にかかり、それらは並進または回転であり得ます。action-onlyまたはaction-reaction特性をもつことが可能です。それらはシステムの変位、速度、およびその他のシステム内の状態に非線形的に依存することがしばしばあります。フォース、特に実験的に計測されたフォースは、時間の関数として表されることがあります。例として、航空機の翼にかかる空気力や、路面によって車両の軸にかかる道路荷重が挙げられます。MBSツールはすべて、フォースコネクターの大きなセットをサポートします。 図 5 は、フォースコネクターの例を示しています。
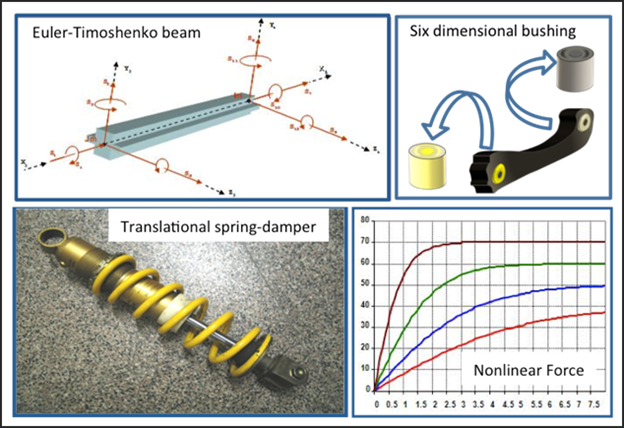
図 5. フォース要素の例. (スプリングダンパー: 取得元 http://it.wikipedia.org/wiki/File:Ammortizzatore.jpg(最終アクセス日: 2009年11月29日)) - ティモシェンコ梁: ウクライナ生まれの科学者ティモシェンコにより展開された式によりモデル化された梁
- ブッシュ: この要素は、2つの異なるパートに属する2つの座標系間にかかる線形の荷重とトルクを定義します。荷重とトルクは、スプリング荷重、減衰荷重、およびプレロードベクトルから成ります。ブッシュ要素は一般的に、振動の軽減、ショックの吸収、騒音の軽減、不整列の調整に使用されます。
- フィールド: これは、ブッシュの一般化で、線形または非線形であり得ます。
- スプリングダンパ: 要素は、2つの座標系間にかかるスプリングとダンパのペアを定義します。この要素は、力またはモーメントにかかることが可能です。力は、剛性係数、減衰係数、自由長、およびプレロードによって特徴付けられます。
- 一般的な力: これらは、力またはトルクの単一のコンポーネント、または、2つのボディ間にかかる力および / またはトルクベクトルを定義します。コンポーネントは、入力ファイル内の関数式として、またはユーザー記述のサブルーチンを介して定義することが可能です。コンポーネントは、システムの変位、速度、およびその他のシステム内の状態の関数であり得ます。
- 剛体接触: これは、2つの剛体上の幾何形状間の3D接触力を定義します。最初のボディの幾何形状が2つ目のボディの幾何形状に貫通している場合は、垂直抗力と摩擦力が発生します。垂直抗力は、接触のポイントにおける共通の法線に沿って、モーションを押し戻す傾向があります。摩擦力は、相対スリップを妨害する傾向があります。接触力は、貫通がなくなった際には消えてなくなります。接触は、連続的、もしくはインパルス性であり得ます。いくつかのシンプルな例については、図 6をご覧ください。
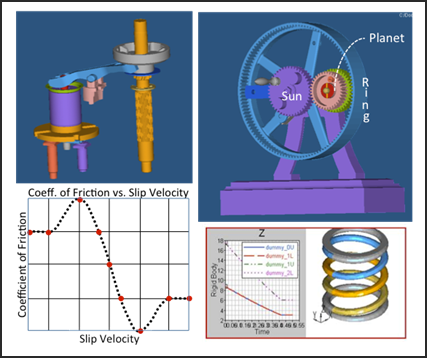
図 6. 接触要素の例MotionSolveでは2D接触と3D接触の両方を扱うことが可能 - 剛体-弾性体および弾性体-弾性体接触: これらは通常、点-可変曲線フォース要素、点-可変面フォース要素、または可変面-可変面フォース要素としてモデル化されます。曲線または面は、シミュレーション中に変形する機能があります。 図 7 は、球体と高度に変形可能な面との衝突を示しています。
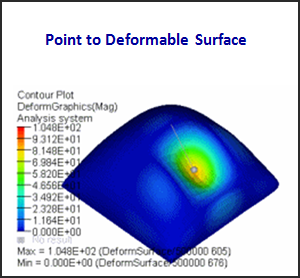
図 7. 点-可変形サーフェスの接触力 - 抽象的システムモデリング要素: 抽象的要素、主に微分方程式の類は、MBSモデル内の非標準的コンポーネントを表すために使用することができます。微分方程式は一般的に、動的サブシステムの挙動を捕捉するために使用されます。例えば、これらは、列車のエアスプリングの影響を表すことができます。線形および非線形状態-空間方程式と伝達関数も、一般的に使用が可能です。これらは、正しく定義された入力、出力、および内部状態でコンポーネントを表します。 図 8 は、MotionSolveでの抽象的システムを示しています。
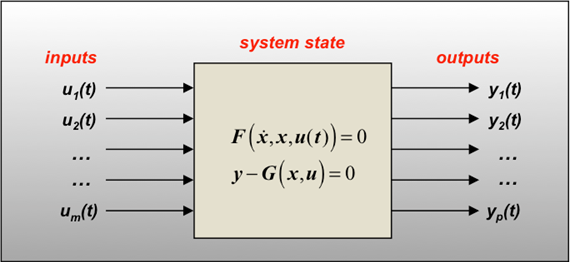
図 8. MotionSolveでの抽象的システムのモデリング