クローラ・履帯モデル
ブルドーザー、掘削機、ロボット、スノーモービル、軍用車両などの装軌車両用のクローラ・履帯プラグイン。
MotionViewとMotionSolveのクローラ・履帯プラグインは、軟質土壌の表面と相互に作用する、2つ以上の車輪で駆動または停止される連続した帯状のトレッドまたは履板を自動的に組み立てます。
定義
- Wheel
- 車両重量を履板に伝達します。
- Sprockets/Sprocket-wheel
- チェーンや履板に噛み合う歯(コグ)を持つ形状のホイール。スプロケットとその歯は球体としてモデル化され、チェーンや履板に接触して運動を伝達します。
- Idler
- ベルト、チェーン、履板の軌道の変更、ラップ角を大きくするのに使用するホイール。
- Roller/Track Support Roller/Track Return Roller
- 履板のカテナリ部の垂れ下がりを防ぎ、履板の荷重を支えるための小型ホイール。
- Tensioner
- クローラ・履帯の操縦性、パワー、効率、寿命に影響を与える履板へのテンションを適切に保つためのホイール。
- Pulley
- ベルトと組み合わせて2軸間で動力を伝達するためのホイール。チェーンや履板のスプロケットと同じような機能を持っています。
- Belt
- 力を伝達する連続したフレキシブルなコンポーネント。クローラ・履帯プラグインでは、プーリーからベルトへの動力伝達に球体同士の接触を使用します。
- Chain
- 複数のリンクを使用して力を伝達するコンポーネント。クローラ・履帯プラグインではスプロケットからチェーンへの動力伝達に球体同士の接触を使用します。
- Track
- 力を伝達し、ホイールから地面へと荷重を分散させるコンポーネント。クローラ・履帯プラグインではスプロケットから履板への動力伝達に球体同士の接触を使用します。球 - ボックス接触は、ローラー、ホイール、アイドラー、テンショナーからの力を履板に伝えるために使用されます。
- Soft Soil
- 履板と土壌の間の相互作用をモデル化するのに使用され、広く利用されているBekker、Janosi、McKyesの各アプローチに基づいています。
プロセス
MotionViewクローラ・履帯モデルを正確に作成するには、スプロケットやホイールなどの転動体のシステムを作ります。転動体は、クローラ・履帯プラグインが履板のパスを識別するために必要です。転動体が作成されると、その転動体を囲むようにして履板を作成します。さらに、クローラ・履帯を構築した後に、特定のクローラ・履帯要素の更新を行うことができます。最後に、軟質土壌モデルを更新します。クローラ・履帯ごとに軟質土壌モデルが自動的に生成されますが、これらのモデルはデフォルトのプロパティが与えられているため、アプリケーション上で更新が必要になる場合があります。詳細な手順は、チュートリアルを参照してください 。

図 1. クローラ・履帯モデルプロセス
Create Rolling Systemダイアログ
このダイアログを使って、スプロケット、アイドラー、ローラー、テンショナー、ホイール、プーリーなどの転動体を作成します。Symmetric pairオプションを使用すると、x-z平面に対して対称な転動体を作成することができます。転動体は、通常、プリミティブなジオメトリを組み合わせて作成します。あるいは、CADやH3Dグラフィックスを転動体システムに追加して、モデルの忠実度を高めることも可能です。転動体システムの質量と慣性は、提供されたジオメトリ寸法またはCADグラフィックスに基づいて計算させることも、ユーザー質量と慣性を定義することも可能です。転動体システムのプロパティは、システム作成後のrolling systemの下のデータセットで変更することができます。
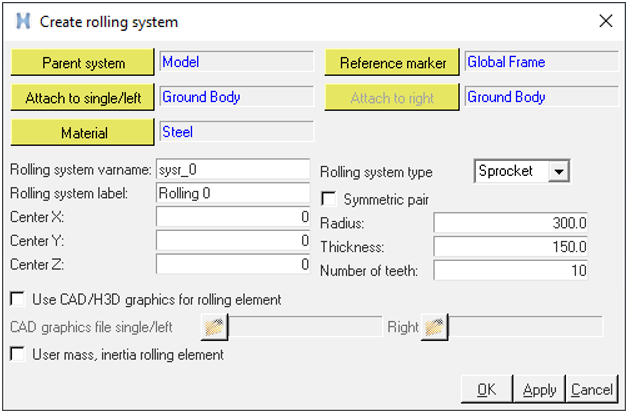
図 2. Create rolling systemダイアログ
Wrap Rolling Systemダイアログ
このダイアログは、転動体システムを履板、チェーン、またはベルトのいずれかでラップするのに使用します。Track/ChainまたはBeltオプションを選択してラッピングタイプを選択します。履板は、スプロケットとトラックの間は球-球の接触を、他のエンティティと履板の間は球-ボックスの接触を使用します。チェーンは、スプロケットとチェーンの球同士の接触を使用します。ベルトでは、すべてのエンティティとベルトの間に球-球の接触を使用します。デフォルトでは、履板、チェーン、ベルトは、プリミティブなジオメトリの組み合わせで表現されます。必要に応じて、履板、チェーン、ベルトのすべてのエンティティにCADまたはH3Dファイルを代わりに使用することができます。CADやH3Dファイルは、中間のマーカーに配置され、データセットを使って再配置することができます。
はじめに、履板、チェーン、ベルトにおいて使用されている”転動体”の総数を入力します。指定した数に応じて、ダイアログの表示が更新されます。転動体を時計回りに選択し、履板、チェーン、ベルトをラップします。つまり、転動体システムのローカルな参照フレームにおけるY軸を中心とした正の方向です。すべての転動体システムのラッピングは、同じ参照フレームを共有する必要があります。
ベルト、チェーン、履板は、転動体の内側または外側に配置されるようにラップできます。ラッピングをベースにした一部の転動体は、初期状態ではベルト、チェーン、または履板に接触していないが、シミュレーションの途中で接触する場合があります。
土壌相互作用は、チェーン駆動やEDEMからの粒子を使用したシミュレーションの場合に必要なければオフにすることができます。
- Soft Soil
- Rigid Contact
デフォルトで、軟質土壌モデルまたは剛体接触は、システムと地面の相互作用を表現するベルト、チェーン、または履板上で定義されます。剛体接触は、土壌地形ファイルから作成された地形グラフィックスまたは外部ソースから生成されたCAD形状を使用して定義できます。
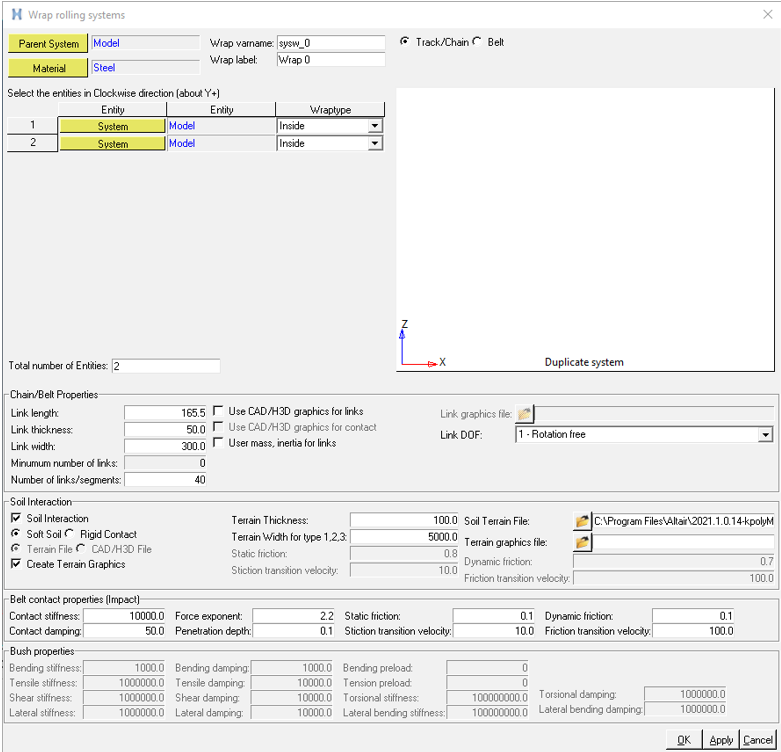
図 3. Wrap rolling systemsダイアログ
ベルト、チェーン、履板のリンクは、横方向の動きを防ぐために互いに拘束されています。拘束の種類は、アプリケーションの要件に応じて変更することができます。リンク、転動体、ベルト、チェーン、履板の接続の詳細と、それぞれの接続でサポートされているジオメトリタイプを以下に示します。
| リンクDOF (自由度) | 結合 | 横方向の拘束 | 形状タイプ |
|---|---|---|---|
| 1 - 回転自由 | すべてのリンクに回転ジョイント、最初のリンクと最後のリンクの間にインラインジョイントを適用。 | 平面 | 自動、 CAD |
| 1 - 回転と曲げ剛性 | すべてのリンクに回転ジョイント、最初のリンクと最後のリンクの間にインラインジョイントを適用。回転剛性と曲げ予荷重は、すべてのリンク間でサポートされます。 | Planar | 自動、CAD |
| 2 - 引張と曲げ剛性 | すべてのリンクに平面ジョイントと面内プリミティブジョイントを適用。すべてのリンク間の回転剛性と曲げ予荷重に加えて、引張剛性と引張予荷重にも対応しています。 | Planar | 自動、CAD |
| 6 - 全方向の剛性 | 全リンク間の引張剛性と引張予荷重。このオプションは、回転、横方向、せん断、ねじり、横方向の曲げ剛性に加えて、すべてのリンク間の予荷重をサポートします。 | None | CAD |
必要なデータが入力されると、ラップされたベルト、チェーン、履板システムのプレビューが自動的に表示されます。入力されたデータに問題がある場合、プレビューエリアの下部にエラーメッセージが表示されます。カテナリ曲線は、最低必要量以上のリンクが存在する場合に含まれます。逆に、リンクの数が最小量に満たない場合は、ベルト、チェーン、履板に隙間ができます。その場合、シミュレーション時にギャップを閉じるために、最初のリンクと最後のリンクをつなぐフレキシブルな剛性エンティティが作成されます。これは、シミュレーションを開始すると同時に、ベルト、チェーン、または履板に引張荷重がかかるため、設計上好ましいとされています。
地形グラフィックスを作成し、地形を可視化するためのParasolid出力ファイルを提供できます。
システムが生成された後、転動体システムの下にあるデータセット内で、システムの特性に対する追加調整を行うことができます。
軟質土壌モデルは、路面参照マーカーを使って位置を決めることができます。
クローラ・履帯 - 土壌相互作用のための出力要求の一覧
- 各リンクの参照マーカーを基準としたグローバル方向の土圧。
- 各リンクのリンクローカル座標での土圧。
- 各リンクの沈み込み、縦方向の滑り、横方向の滑り。
- 各ラップの総土圧。
- 全ラップの全リンクの総土圧。
出力要求のEntity setオプションを使用し、すべての接触に対する接触力の出力を要求できます。引張力や曲げ力などの力に対する出力は、それぞれのジョイントや力において求めることができます。リンクの中間のマーカーは、力の参照マーカーとして使用できます。
Update Link Geometryダイアログ
このダイアログでは、履板のリンク形状情報を更新します。
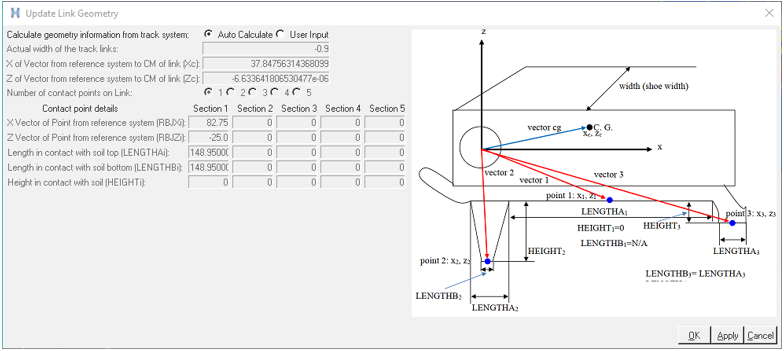
図 4. Update Link Geometryダイアログ
入力フィールドは、入力された選択項目に基づいて有効または無効になります。すべての入力はモデル単位となります。初期値はモデル単位で、用途に応じて変更することができます。リンクの形状については、リンク形状を参照してください。
Update Soft Soilダイアログ
このダイアログでは、土壌とクローラ・履帯リンクの間の相互作用を定義する土壌のプロパティを更新します。エンティティは、入力された選択項目に基づいて有効または無効になります。すべての入力はモデル単位となります。初期値はモデル単位で、用途に応じて変更することができます。軟質土壌については、 軟質土壌データ入力を参照してください。
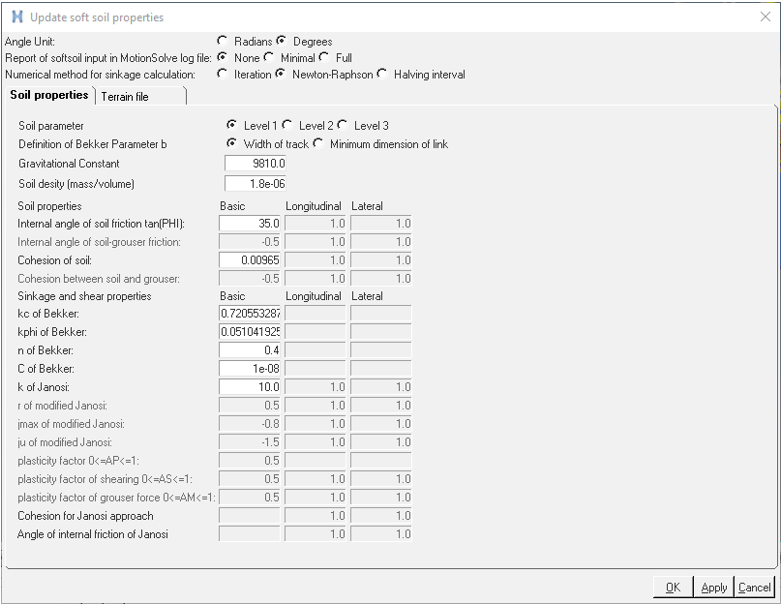
図 5. Update soft soil propertiesダイアログ