応用分野6:動的応答の最適化
多くの場合、最適化のタスクは、何らかの方法で動的応答を最適化できる設計変数の値を見出すことです。
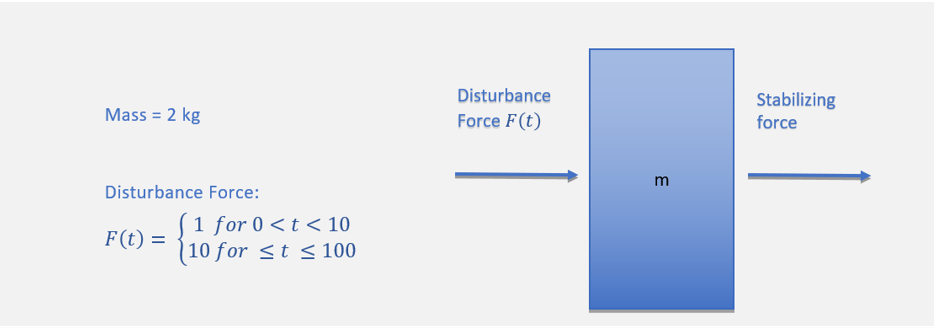
図 1.
上の図は、スタビライザーを簡素化して表しています。基本的に、スタビライザーは、質量が初期の位置から逸脱しないようにするPIDコントローラーです。摂動力は時変関数です。
- 目的
- 時間の経過に伴う変位、速度、加速度それぞれの大きさの積分を最小化します。利得の値が特定の数値を下回るように維持します(制約条件を追加することで実現できます)。
- 設計変数
- PIDコントローラの3つの利得を設計変数とします。
注: 例えば、感度の計算には有限差分を使用します。コードと詳しい説明については、PIDコントローラの例のセクションをご参照ください。