応用分野1:経路の合成
この手法は、自由度がゼロであるシステムなど、おもに運動学的機構のモデルで使用します。通常は、入力リンクのいずれか1つに入力モーションを指定します。ここでのタスクは、別のいずれかのリンクにある出力ポイントが、規定した経路をたどるように、リンクの長さを計算することです。
下の左側の図に示す4バー機構を検討します。リンクABに対して入力θ(t)を指定します。リンクABがピボットを中心に回転すると、カプラーリンクの中点が、青い破線で示された経路を移動します。
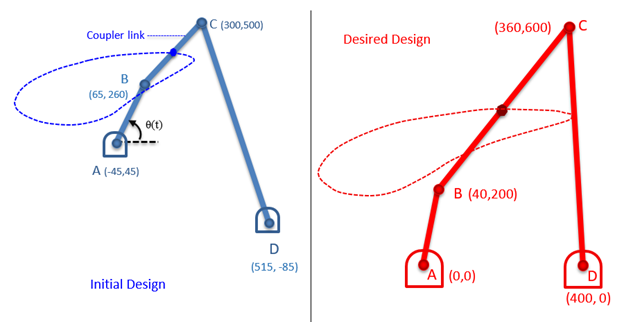
図 1.
図 1.
- 設計目的
- カプラーリンクの中点が、右側の図に赤色で示した経路を移動するように、4バー機構のリンク長さを決定します。
- 設計変数
- リンク長さを決定するポイントA、B、C、Dの位置。