パラメトリックモデルクラス
このクラスには、モデルの設計パラメータの値と各種のメソッドが属しています。これらのメソッドを使用して、モデルの生成、応答の追加、最適化の実行、結果の出力を実現します。
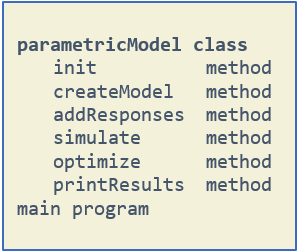
| init | パラメトリッククラスのインスタンスを作成します。 |
| createModel | 最適化エンジンに渡すことができる設計可能モデルを作成します。 |
| addResponses | 設計可能モデルに応答を追加します。これらの応答は、コストと制約条件の定義に使用します。 |
| simulate | デバッグ目的専用です。このメソッドはシミュレーションを実行して、設計可能モデルを問題なく実行できることを確認します。 |
| optimize | 最適化を実行します。 |
| printResults | 必要とする結果を画面とログファイルに出力します。 |
| main | シミュレーションを実行するための各種のメソッドを呼び出します。 |
平面4バー機構モデルは、4つの設計ポイントA、B、C、Dを使用して定義します。
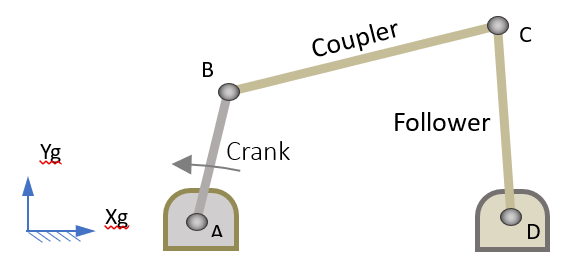
図 1.
図 1.
この4バーは、以下の構成によるRSUR機構です:
- RがポイントAにあります
- SがポイントBにあります
- UがポイントCにあります
- RがポイントDにあります
AとDにある2つの回転ジョイントでは、そのZ軸が、全体座標系のZ軸と平行に定義されます。
Bにある球ジョイントでは方向は考慮されません。
The universal joint at C is defined as follows:
- 全体座標系のZ軸と平行な1番目のZ軸であるzi
- ziおよびBからCを結ぶラインに垂直な2番目のZ軸であるzj
モデル全体は、これら4つの設計ポイントA、B、C、Dによってパラメータ化されます。
このモデルは2D空間で動作するため、設計変数はax、ay、bx、by、cx、cy、dx、dyの8つになります。
これら8つの設計変数と、これらの変数の設計制限値を次のように指定します。
| DV | 値 | (bi, bu) |
|---|---|---|
| ax | -45 | (-50 ,50) |
| ay | +45 | (-50 ,50) |
| bx | +65 | (+20 ,80) |
| by | +260 | (+180,280) |
| cx | +300 | (+240,380) |
| cy | +500 | (+400,620) |
| dx | +515 | (+180,520) |
| dy | -85 | (-100,20) |
このパラメトリッククラスにはFourBarという名前が割り当てられます。以下に、このクラスの定義の概要を示します。
class Fourbar (object):
def __init__ (self, ...)
...
def createModel (self):
...
def addResponses (self):
...
def simulate (self):
...
def optimize (self):
...
def printResults (self):
...