PIDコントローラの例
この例では、PIDコントローラを設計します。このPIDコントローラの役割は、ブロックの位置、速度、および加速度に外乱力が及ぼす影響を最小にすることです。
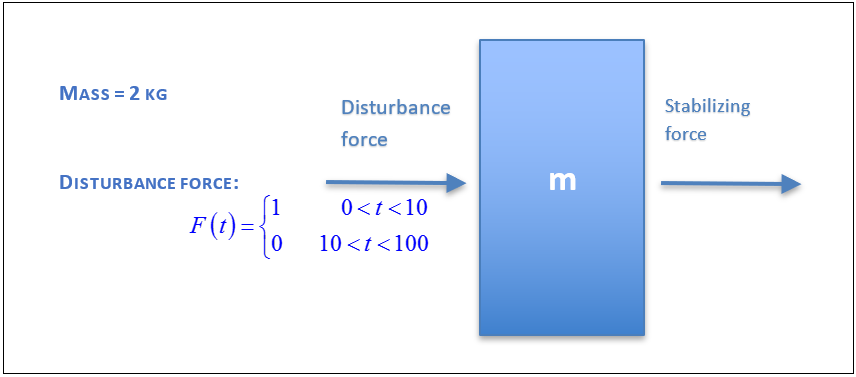
図 1.
上記の図では、質量2kgのブロックが外乱力F(t)を受けています。PIDコントローラは、安定化力をかけることによって外乱の影響が減衰するようにして、ブロックを元の位置に戻す必要があります。
- 設計目的
- この最適化の目的は、変位、速度、および加速度に外乱によって発生する、初期静止位置からのRMS偏差の合計が最小になるように、PIDコントローラのパラメータを決定することです。
- 設計変数
- PIDコントローラの3つの利得である
を設計変数(Dv)として定義します。
DV 値 bL, bU kp 0.0 (0.0, 1.0) ki 0.5 (0.0, 1.0) kd 0.0 (0.0, 1.0) - 定数
- 1 – kp2 – kd2 – ki2 < 0