PITCH
PITCH関数は、body-3のヨー-ピッチ-ロール回転シーケンスの2つ目の角度をラジアンで計算します。
フォーマット
PITCH(I, J)説明
最初は同じ方向を向いている2つの座標系(IとJ)がある場合、この回転シーケンスは次のように定義されます:
- まず、I座標系のz軸の周りを反時計回りに回転します[YAW]。
- 次に、I座標系の負のy軸の周りを反時計回りに回転します[PITCH]。
- 最後に、I座標のx軸の周りを反時計回りに回転します[ROLL]。
1つ目の引数であるマーカーIは指定する必要があります。2つ目の引数であるマーカーJは省略可能です。
引数
- I
- 回転変位を計算するマーカー。
- J
- 回転変位計算の基準となるマーカー。この引数は省略可能です。省略した場合は、デフォルトで地面座標系に設定されます。
例
<Post_Request
comment = "Vehicle Orientation (degress)"
id = "70000256"
type = "EXPRESSION"
expr1 = "NULL"
expr2 = "YAW(30301010,30101010)*RTOD"
expr3 = "PITCH(30301010,30101010)*RTOD"
expr4 = "ROLL(30301010,30101010)*RTOD"
/>コメント
下の図は、ヨー-ピッチ-ロール回転シーケンスの物理的意味を示しています。
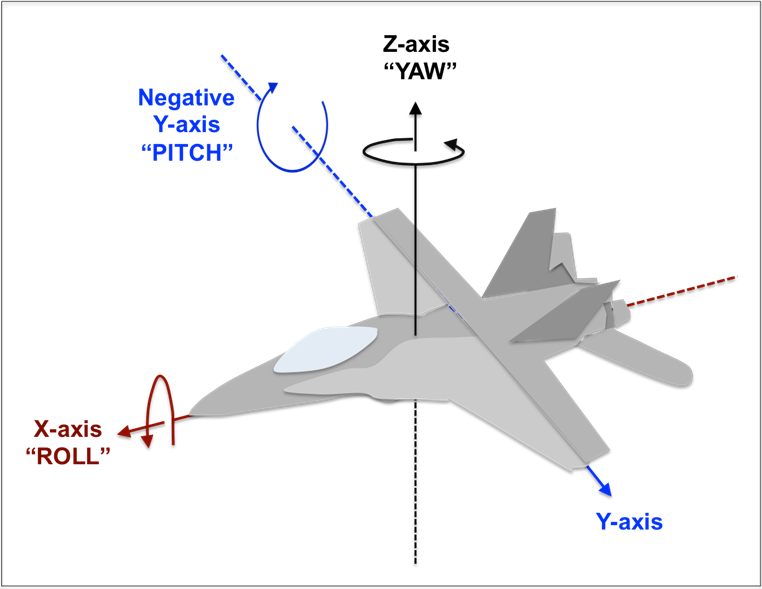
図 1.
図 1.