MV-2021:車のドア閉鎖のシミュレーション
本チュートリアルでは、弾性体モデルと剛体モデルを作成し、ドアの閉鎖のシミュレーションを行う方法について学習します。
- FEMファイルを用いた弾性体ファイルの作成
- ボディのデータを使った剛体モデルの作成
- ドアを弾性体とし、作成された弾性体ファイルをモデルで使用
- ドア閉鎖のシミュレーションのセットアップ
弾性体ドア用の有限要素モデルの確認
このステップでは、弾性体作成のスターティングポイントとなる有限要素(FE)モデルの内容を確認します。
-
モデリングウィンドウの左側にあるModelブラウザをクリックし、モデルツリーを展開して、モデルのすべてのコンポーネント、プロパティおよび材料を確認します。
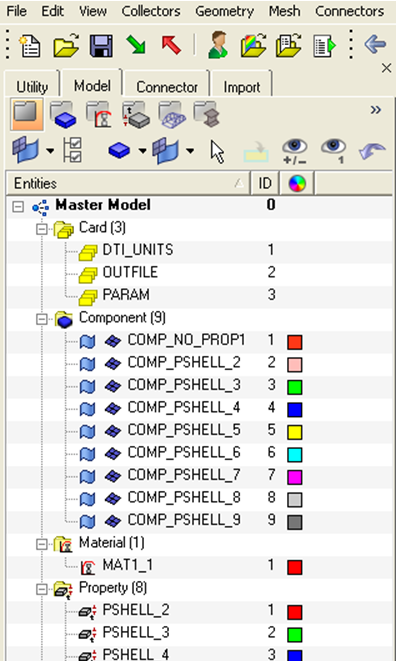
図 1.FEMモデルは下記の属性を有しています:
- すべてのコンポーネントについて、質の高い適正なメッシュ
- すべてのコンポーネントに断面プロパティが割り当てられている
- すべてのコンポーネントは、適切な材料を参照している
Flex Prepによる弾性体の作成
このステップでは、Step 1で作成したFEMファイルを使い、Flex Prepで弾性体H3Dファイルを生成します。本チュートリアルのこのステップを実行するにあたっては、MV-2010:Flex PrepとOptiStructを使った弾性体の作成で説明されているFlex Prepの理解が前提とされます。
-
MotionViewでFlexToolsメニューからFlex Prepを選択します。
FlexBodyPrepダイアログが表示されます。
図 2. -
FlexBodyPrepダイアログで、ドア閉鎖モデル構築用の弾性体を作成するための以下の情報を入力します。
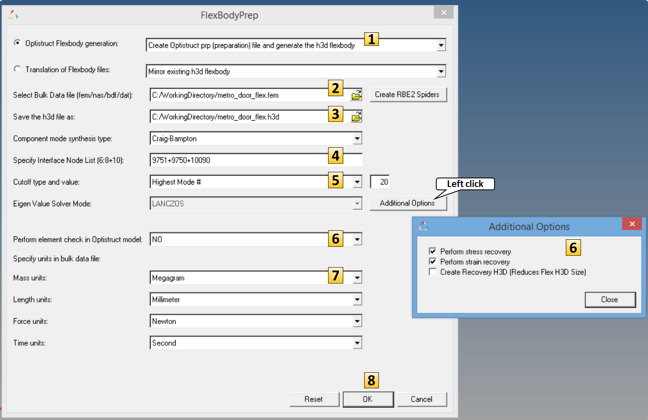
図 3. データの入ったFlexPrepユーティリティ
車のドアのMBDモデルを作成
このステップでは、車のドアのMBDモデルを作成します。これが終わると、ドア閉鎖のシミュレーションを行うことが可能になります。
このモデルには、長さにミリメーター、質量にメガグラム、力にニュートン、時間に秒の単位を使用します。
モデルユニット
ポイント
このモデルを作成するには、全部で6つのポイントを作成する必要があります。

図 4. モデルに必要なポイント
Bodies
このモデルには2つのボディが含まれます。1つは車を、もう1つは弾性体ドアを表します。
-
ProjectブラウザでModelを右クリックし、を選択、またはツールバーからBodies
 を 右クリック)します。ボディを1つ追加し、Car Bodyと命名します。
を 右クリック)します。ボディを1つ追加し、Car Bodyと命名します。
-
Car BodyのPropertiesタブをクリックし、下の表に示すとおり、質量および慣性プロパティを入力します。

図 5. Car Bodyの質量および慣性プロパティ
Graphics
上のPoint 6の後、Door Bodyはグラフィック表示されていますが、Car Bodyはまだです。ファイルのグラフィックをCar Bodyに追加し、モデルの可視状態がより意味をもつようにします。
-
Input FileドロップダウンメニューからHyperMeshを選択します。ファイルブラウザを使って、HyperMeshファイルcar_body_graphics.hmを選択します。
Output Graphic File欄は自動的に入力されます。
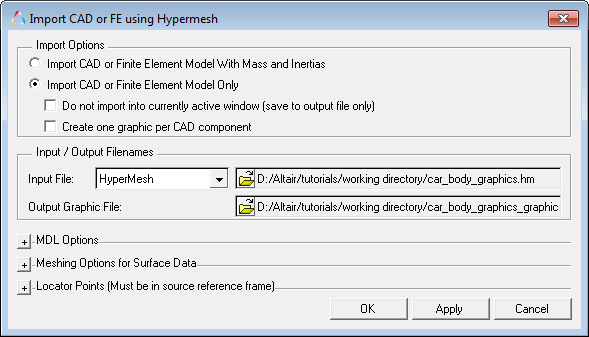
図 6. -
Graphicsパネル
 で、今しがた追加されたグラフィックをクリックします。
で、今しがた追加されたグラフィックをクリックします。
ジョイント
このボディには、4つの拘束 / ジョイントを追加する必要があります。これらのジョイントの1つは、XMLテンプレートを使って追加しなくてはなりません。
-
ProjectブラウザでModelを右クリックし、を選択、またはツールバーからJoint
 を 右クリック)します。
を 右クリック)します。
-
下の一覧に示すとおり、ジョイントを追加します。

図 7. 作成すべきジョイントとそのトポロジージョイントが指定されたら、モデル内に弾性体が存在するため、弾性体の取り付け節点を対応するジョイントマーカーに関連付ける必要があります。
初期条件
本シミュレーションでは、ボディの初速度がモデルへの主運動の入力として機能します。
Markers
車のドアのロック機構を表すため、当初は非アクティブとなっているCar BodyとDoor Bodyの間のfixedジョイントをアクティブにするセンサーを使用します。固定ジョイントは、XMLテンプレートを使って作成する必要があります。これは、MotionViewインターフェースでは、ボディとポイントを使ってジョイントが作成できるためです。ここでは、初めは一致していない2つのマーカー間にジョイントを作成しなくてはなりません。
-
ProjectブラウザでModelを右クリックし、を選択、またはツールバーからBodies
 を 右クリック)します。
を 右クリック)します。
-
下の一覧に示すとおり、マーカーを追加します。

図 8. 作成すべきマーカーとそのトポロジー
Sensors
このモデルでは、ドアの閉鎖を検知するためにEvent Sensorを使用します。この事象が検知された瞬間、ドアとボディの間の固定ジョイントがアクティブとなり、実際のロック機構をシミュレートします。
-
ProjectブラウザでModelを右クリックし、を選択、またはツールバーからSensor
 を 右クリック)します。
を 右クリック)します。
テンプレート
ドアロックをシミュレートするためには、ドアとボディの間に固定ジョイントが必要です。この固定ジョイントは、センサーで作動する必要があります。ジョイントの作動とセンサーの非アクティブ化は、1つのシーケンシャルシミュレーションの操作を使って行うことができます。
-
ProjectブラウザでModelを右クリックし、を選択、またはツールバーからTemplate
 を 右クリック)します。テンプレートをモデルに追加し、Lock Fix Jointとラベル付けします。
を 右クリック)します。テンプレートをモデルに追加し、Lock Fix Jointとラベル付けします。