問題5:機構のリンクの動解析
目的
下図の機構で、入力ギア2は一定の角速度10rad/sで反時計回りに回転しています。ここでの目的は、リンク5の角速度がゼロのときの、ギア3とリンク4の角速度を求めることです。
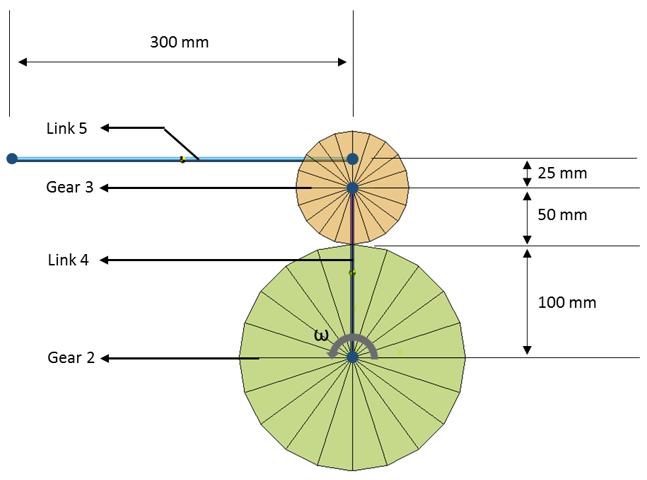
図 1.
図 1.
検証対象
- 剛体
- ギアジョイント
解析のタイプ
- 動的
参考資料
THEORY OF MACHINES AND MECHANISMS, Third Edition by John J. Dicker, Jr., Gordon R. Pennock, Joseph E. Shigley:110
モデルファイル
gear_joint_mechanism.mdl - MotionViewモデル
gear_joint_mechanism.xml - MotionSolveデック
結果のグラフ
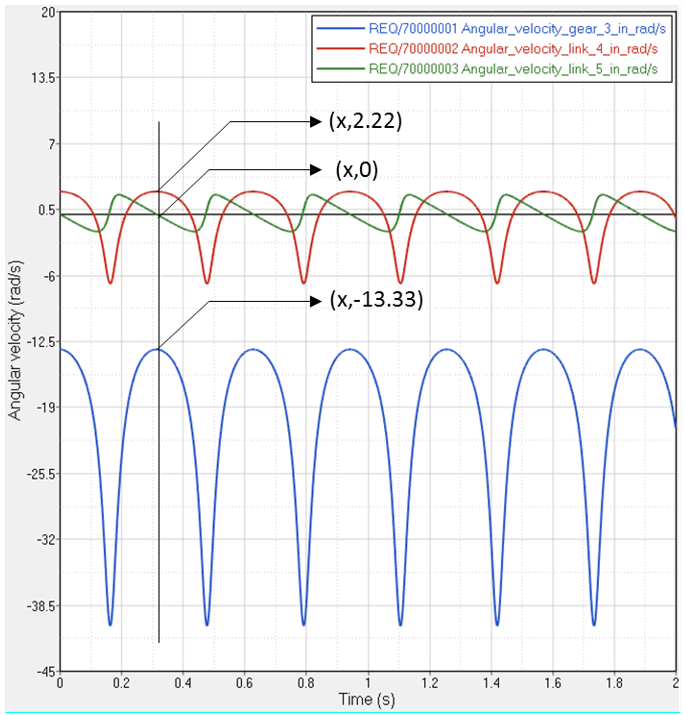
図 2.
結果の比較
| 出力 | 解析 | MotionSolve | 誤差(%) |
|---|---|---|---|
| ギア3の角速度(rad/s) | -13.33 | -13.33 | 0% |
| リンク4の角速度(rad/s) | 2.22 | 2.22 | 0% |
まとめ
MotionSolveの結果は、解析結果と良好に一致しています。