結果の可視化 - アニメーションとリクエストのプロッティング
- 物理現象の容易な把握
- エラーの迅速な検出
- 説得力のある結果表現の作成
 |
 |
 |
 |
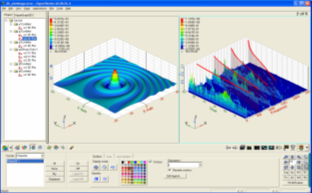
これらの画像は、2Dと3Dのプロットとアニメーションでマルチボディシミュレーションの結果を可視化する、Altair Simulationの高機能なツール群を示しています。
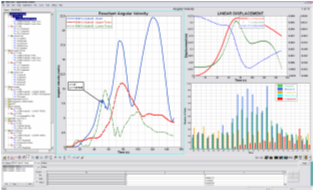
プロット
プロットは、システムの挙動に関する詳細情報の取得、および、フィルタリングなど、後続のエンジニアリング計算に不可欠です。
- Altair バイナリフォーマット(ABF): このバイナリファイルは、非常に大きいデータセットを高速でプロットするように最適化されています。プロッティングに推奨されるフォーマットです。
- マルチボディ結果ファイル(MRF): このバイナリファイルの主な目的は、アニメーションに使用されるH3Dファイルを生成するポストプロセッサモジュールにパートの変位データを提供することです。H3Dファイルフォーマットについては、このドキュメントの後半で説明しています。MRFファイルはプロットの作成にも使用できます。ただし、パフォーマンスはABFファイルに比べ、遅い場合があります。
- プロットファイル(PLT): HyperGraphを使用してプロッティングできるASCIIファイルです。このファイルの主な目的は、荷重を変換してMotionSolveからNastranやOptiStructなどのFEAソフトウェアにエクスポートし、そこからMotionViewのLoad Summaryユーティリティを使って耐久性シミュレーションを行うことにあります。
MRFとABFファイルにはデフォルトで、すべてのパートの変位時刻歴、および、下の一覧に示すようなその他の情報が含まれます:
| タイプ | コンポーネント | 詳細 |
|---|---|---|
| Rigid Body | X, Y, Z | Position |
| E0, E1, E2, E3 | オイラーパラメータにおける方向。 | |
| VM, VX, VY, VZ | 速度の大きさとX、Y、Z成分。 | |
| WM, WX, WY, WZ | 慣性主軸座標系の角速度の大きさとX、Y、Z成分。 | |
| ACCM, ACCX, ACCY, ACCZ | 加速度の大きさとX、Y、Z成分。 | |
| WDTM, WDTX, WDTY, WDTZ | 慣性主軸座標系の角加速度の大きさとX、Y、Z成分。 | |
| Flex Body | X, Y, Z | Position |
| E0, E1, E2, E3 | オイラーパラメータにおける方向。 | |
| Q/i, i = 1, 2, ..., n | モード座標。 | |
| QD/i, i = 1, 2, ..., n | モード速度。でFLEX_VEL_ACC_OUTPUT属性をTRUEに設定している場合は、これらが出力ファイルに書き込まれます。 出力:結果 | |
| VM, VX, VY, VZ | 速度の大きさとX、Y、Z成分。でFLEX_VEL_ACC_OUTPUT属性をTRUEに設定している場合は、これらが出力ファイルに書き込まれます。 出力:結果 | |
| QDD/i, i = 1, 2, ..., n | モード加速度。でFLEX_VEL_ACC_OUTPUT属性をTRUEに設定している場合は、これらが出力ファイルに書き込まれます。 出力:結果 | |
| ACCM, ACCX, ACCY, ACCZ | 加速度の大きさとX、Y、Z成分。でFLEX_VEL_ACC_OUTPUT属性をTRUEに設定している場合は、これらが出力ファイルに書き込まれます。 出力:結果 | |
| SE | ひずみエネルギー。 | |
| System | KE | 運動エネルギー |
| CPU Usage | 使用されたCPU時間の合計 | |
| CPU/Sim.Time Ratio | 使用されたCPU時間の合計とシミュレーション時間の比 | |
| Stepsize | 積分で使用された実際のステップサイズ | |
| Integration Order | 積分で使用された積分器の次数 |
- 変位、速度、加速度、ボディやジョイントにかかるフォースなど、一般的に要求されるビルトインのタイプを使用
- MotionSolveの式を使用します。例えばDM(1, 2)は、識別子1と2のついた2つのマーカーの原点間の距離を出力します。
- C/C++、Fortran、またはPythonで作成したユーザー定義のサブルーチンを使用します。
詳細については、RADIOSS, MotionSolve, and OptiStructオンラインヘルプのReference Guide内、Post: Output Requestのトピックをご参照ください。
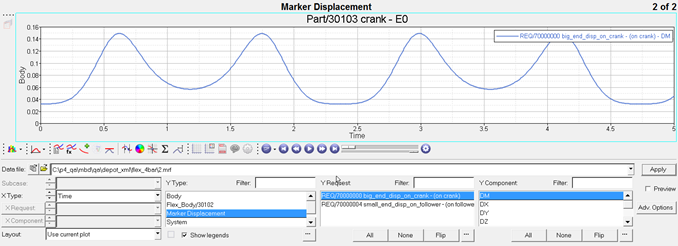
図 1.
プロットデータがType、Request、Componentカテゴリーにまとめられている例
下の一覧は、各リクエストについて予め定義されているコンポーネントの一覧です:
| タイプ | コンポーネント | 詳細 |
|---|---|---|
| Marker Displacement | DM, DX, DY, DZ | 変位の大きさとX、Y、Z成分 |
| E0, E1, E2, E3 | オイラーパラメータにおける方向 | |
| PSI, THETA, PHI または YAW, PITCH, ROLL angles | オイラー角度(B313)またはYAW、PITCH、ROLL角度のいずれかで表現された慣性主軸座標系の方向。選択は、Output: Resultsコマンド内のANGLE_TYPE属性を指定することで行われます。 | |
| Marker Velocity | VM, VX, VY, VZ | 速度の大きさとX、Y、Z成分。 |
| WM, WX, WY, WZ | 慣性主軸座標系の角速度の大きさとX、Y、Z成分 | |
| Marker Acceleration | ACCM, ACCX, ACCY, ACCZ | 加速度の大きさとX、Y、Z成分。 |
| WDTM, WDTX, WDTY, WDTZ | 慣性主軸座標系の角加速度の大きさとX、Y、Z成分 | |
| Marker Force | FM, FX, FY, FZ | フォースの大きさとX、Y、Z成分 |
| TM, TX, TY, TZ | トルクの大きさとX、Y、Z成分 | |
| Expressions | F1, F2, ..., F8 | 評価された式を含むベクトル |
上記に加えて、線形解析をリクエストすると、MotionSolveはその線形解析の結果が含まれた*_linz.mrfファイルを書き出します。これらの結果について以下に説明します:
| Type | コンポーネント | 詳細 |
|---|---|---|
| 固有値 | real part | 固有値の実部 |
| imag part | 固有値の虚部 | |
| freq (cycle) | 固有値の虚部(1秒あたりのサイクル数で表現) freq = (imag part) / 2*PI |
|
| damping ratio | 各固有値の減衰比 | |
| natural freq | 各固有値の固有振動数 | |
| Body Eigenvector | dx.real, dy.real, dz.real | システム内の各ボディの固有ベクトルの実部 |
| dx.imag, dy.imag, dz.imag | システム内の各ボディの固有ベクトルの虚部 | |
| % distribution of Kinetic Energy | X, Y, Z | サポートされている各パートの並進方向のモーダル運動エネルギー分布 |
| RXX, RYY, RZZ | サポートされている各パートの回転方向のモーダル運動エネルギー分布 | |
| RXY, RXZ, RYZ | サポートされている各パートの交差回転方向のモーダル運動エネルギー分布 | |
| % distribution of Strain Energy | X, Y, Z | サポートされている各パートの並進方向のモーダルひずみエネルギー分布 |
| RX、RY、RZ | サポートされている各パートの回転方向のモーダルひずみエネルギー分布 | |
| % distribution of Dissipative Energy | X, Y, Z | サポートされている各パートの並進方向のモーダル散逸エネルギー分布 |
| RX、RY、RZ | サポートされている各パートの回転方向のモーダル散逸エネルギー分布 |
アニメーション
アニメーションは、エラーをチェックする素早い方法を提供するだけでなく、自身の結果を多くの人に伝えるための説得力のある表現の作成に役立ちます。
- 追加の圧縮オプションによるコンパクトなファイルサイズ
- 迅速なアニメーション表示
- 有限要素およびマルチボディダイナミクスソフトウェアからのエンジニアリングアニメーション結果を共有するためのシングルフォーマット
- H3Dファイルは、スタンドアロンのHyperView Playerを使ってアニメーション表示することも可能
Post_Graphicモデリング要素を使ってグラフィックスを追加し、モデル内の要素を可視化することも可能です。以下に、MotionSolveで使用可能なグラフィックスのタイプの概要を示します。詳細については、MotionSolve XML Format Reference GuideのPost: Graphicを参照してください。
剛体
剛体の可視化には、下記のグラフィックスタイプから選択が可能です:
| ArcFromRadius ArcFromRM BoxDefinedFromCenter |
BoxDefinedFromCorner CircleFromRadius CircleFromRM |
Cylinder Ellipsoid Frustum |
Plane Sphere TriaMesh Parasolid |
これらのグラフィックスは、可視化および接触にのみ使用される点にご留意ください。これらは質量と慣性情報には影響を及ぼしません。例えば、ボディの可視化にボックスグラフィックを使用する際、その質量と慣性モーメントは、ボックスの形状と材料プロパティに基づいては計算されません。
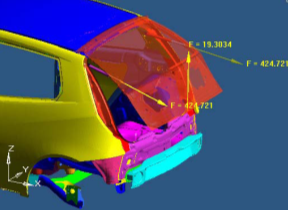
フォースとモーメント

図 2. 力ベクトルのアニメーション表示
アウトライン

図 3. 3. 4つの球状のボディを結ぶアウトライングラフィック
弾性体
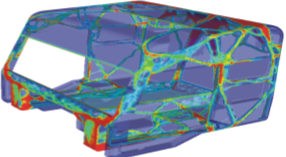
- コンター図
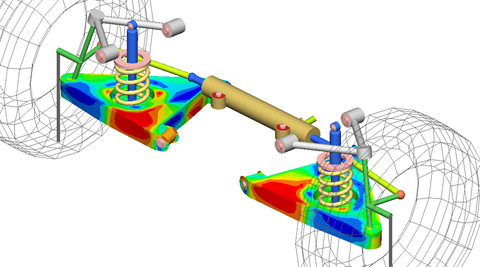
図 4. SLAサスペンションモデルのCMS弾性コントロールアームの結果コンター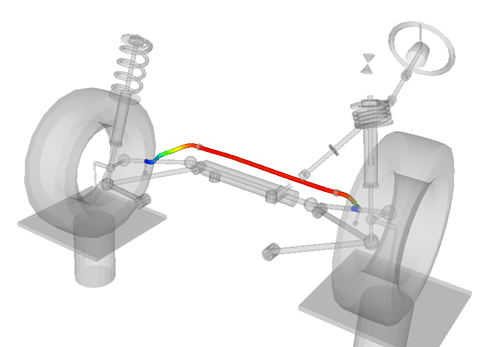
図 5. フロントサスペンションモデル内のNLFEスタビライザーバーの結果コンター変位、回転(CMSのみ)、速度(CMSのみ)、加速度(CMSのみ)、ひずみ、応力など、様々なタイプの結果をコンター図にすることができます。ひずみと応力については、CMS弾性コンポーネントの区分モード合成ソリューション中に対応するモードが計算されるようリクエストする必要があります。NLFEボディの場合は、これらはデフォルトでH3Dに書き込まれます。
注: NLFE要素の結果は常にNODALフォーマットで書き込まれるのに対し、CMS弾性コンポーネントの結果はNODALまたはMODALフォーマット(これはH3DOutputコマンドステートメントのFORMAT_OPTION属性で制御できます)で書き込むことができます。 - ベクトルプロット
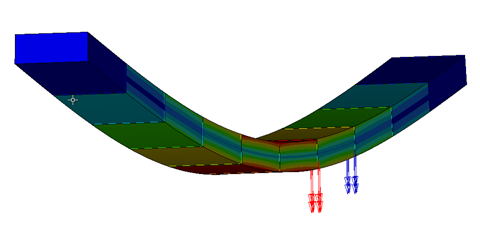
図 6. 応力コンター図上に重ね合わせられたNLFEビームの変位ベクトル変位、速度(CMSのみ)、加速度(CMSのみ)、フォース(CMSのみ)、およびモーメント(トルク、CMSのみ)のデータタイプのベクトルプロットを作成することができます。ベクトルは、ささまざまな座標系で解くことが可能です。スケーリングとクエリ(照会)もサポートされています。ベクトルプロットは、応力コンター図上に重ねて置くこともできます。
- テンソルプロット
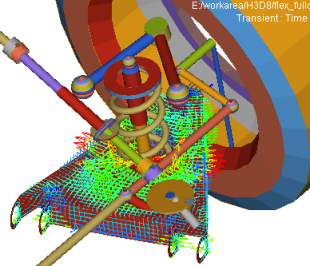
図 7. SLAサスペンションのコントロールアームの応力テンソルテンソルプロットを作成し、応力やひずみなどのテンソル量を可視化することが可能です。PrincipalまたはComponentの2つのフォーマットを使用できます。テンソルは、ささまざまな座標系で解くことが可能です。節点平均化もサポートされています。
これらの可視化アプローチでは、変位と変形はデフォルトで得られます。応力とひずみは、区分モード合成(CMS)ソリューションの中で出力設定する必要があります。
NLFEボディについては、変位、応力、およびひずみの情報はデフォルトでH3Dに書き込まれます。
3D剛体接触
剛体の接触要素が含まれたシミュレーションの最中に、MotionSolveは、垂直抗力、摩擦力、滑り速度など、いくつかの接触関連の量を計算します。これらはシミュレーション後にH3Dに書き込まれ、HyperViewで可視化できるようになります。
- 接触サマリーフレーム:接触サマリーフレームはHyperView内の単一フレームであり、これにより、シミュレーション全体にわたって3D形状で発生した最大貫通を可視化できます。次の図に、接触サマリーフレームの例を示します(分解立体図で)。
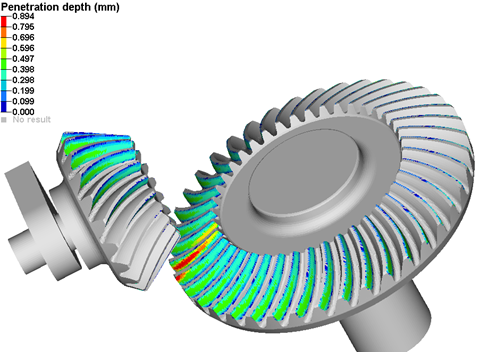
図 8. 接触しているかさ歯車の接触サマリーフレームモデルにアクティブな3D剛体接触が含まれている場合、MotionSolveは、“Contact Overview”という追加の荷重ケースをアニメーションH3Dファイルに書き込みます。この荷重ケース内に、最大貫通深さによって定義されたコンター図を作成できます。
このサマリーフレームでは、シミュレーションをアニメーション表示する前に、シミュレーション内で過剰な貫通が発生していないか素早く確認できます。このサマリーフレームを使用して、接触が発生した領域が想定どおりかどうかを評価することもできます。接触サマリーフレームの詳細については、MV-1010:3Dメッシュ間の接触のシミュレーションのポスト処理のセクションをご参照ください。
- ベクトルプロット:ベクトルプロットを使用して接触力と接触速度を表示することもできます。全接触力に加えて、接触の摩擦力を含む他のいくつかの結果を可視化できます。

図 9. 接触関連のベクトルプロットの結果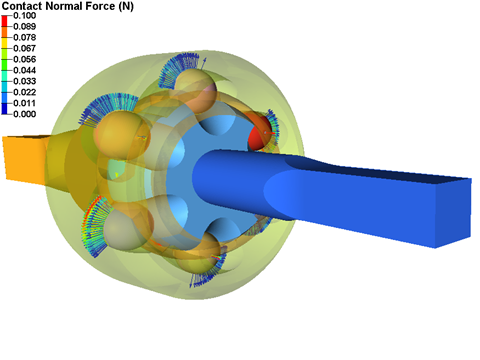
図 10. 等速ジョイント形状の垂直接触力剛体上の各三角形要素について、または接触領域について、これらのベクトルをプロットできます。
- コンター図: ベクトルプロットを使用して接触力と接触速度を表示することもできます。全接触力に加えて、接触の摩擦力を含む他のいくつかの結果を可視化できます。
- 接触力(垂直抗力と摩擦力を含む)
- 接触速度(法線速度と接線速度を含む)
- 接触貫通深さ
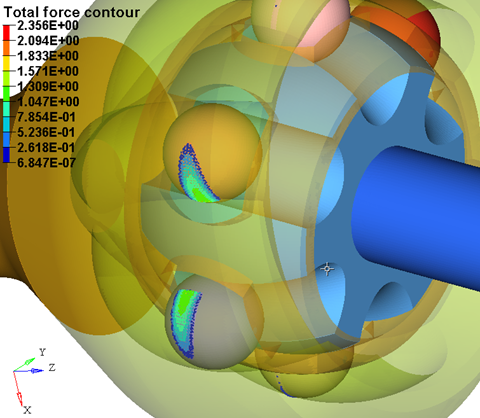
図 11. 等速ジョイント形状の全接触力のコンター