Constraint: Gear
Model ElementConstraint_Gearは、2つのボディ間のギア拘束を定義します。
説明
ギアは、2つのジョイント間の入力変位と出力変位の代数的な関係としてモデル化されます。これらの入力と出力は、回転でも並進でもかまいません。これにより、平歯車、はすば歯車、ベベルギア、およびラックアンドピニオンギアのセットをモデル化できるようになります。
摩擦、バックラッシュ、歯形の製造誤差はモデル化されません。
フォーマット
<Constraint_Gear
id = "integer"
[ label = "string" ]
joint1_id = "integer"
joint2_id = "integer"
cv_marker_id = "integer"
[ is_virtual = {"FALSE" | "TRUE"} ]
</Constraint_Gear>属性
- id
- 要素識別番号(整数 > 0)。この番号は、すべてのConstraint_Gear要素の中で一意です。
- label
- Constraint_Gear要素の名前。
- joint1_id
- ギア拘束によって出力が連成される1つ目のConstraint_Jointを指定します。このパラメータは必須です。ジョイントタイプは以下のいずれかである必要があります:
- 回転
- 並進
- 円筒
- joint2_id
- ギア拘束によって出力が連成される2つ目のConstraint_Jointを指定します。このパラメータは必須です。ジョイントタイプは以下のいずれかである必要があります:
- 回転
- 並進
- 円筒
- cv_marker_id
- 接触ポイントを定義する原点を持つReference_Markerを指定します。このz軸によって、接触ポイントにおけるモーションの方向が定義されます。このパラメータは必須です。cv_marker_idは、ハウジングを含むボディに属している必要があります。
- is_virtual
- 仮想拘束なのか通常の拘束なのかを定義します。is_virtualがTRUEに設定されている場合、拘束は仮想拘束として実装されます。is_virtualがFALSEに設定されている場合、拘束は通常の代数拘束として実装されます。このパラメータは省略可能です。デフォルトはFALSEです。仮想ジョイントの詳細については、Constraint: Jointのコメント22をご参照ください。
例
次の図は、平歯車のペアを示しています。
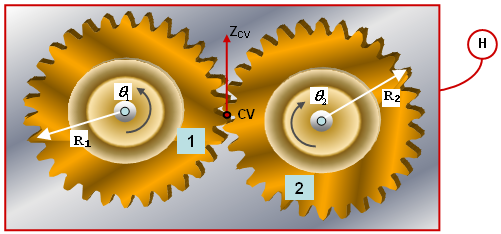 図 1. CONSTRAINT_GEARを使用した平歯車セットの定義
図 1. CONSTRAINT_GEARを使用した平歯車セットの定義
図 1. CONSTRAINT_GEARを使用した平歯車セットの定義ピッチ半径がR1の平歯車1は、回転ジョイント1によってハウジング(赤いボックス)に結合されています。これは、固定軸 周りに回転します。ピッチ半径がR2の平歯車2も、回転ジョイント2によってハウジングに結合されており、固定軸 周りに回転します。どちらの軸も、紙の平面から突き出ています。
2つのギア間の接触ポイント(上図の赤い点)は、ハウジングに対して固定されています。これはReference_Marker CVによって定義されます。CVの原点によって接触ポイントが定義され、その結果として、このギアセットの速度比も定義されます。CVのz軸は、接触ポイントにおけるモーションの方向ひいては歯における接触力の方向を指しています。
cv_marker(CV)のIDは1101とすると、Constraint_Gearオブジェクトは次のように定義できます:
<Constraint_Gear
id = "1"
joint1_id = "1"
joint2_id = "2"
cv_marker_id = "1101" >
</Constraint_Gear>コメント
- 2つのジョイントjoint_1とjoint_2は、ボディを共有している必要があります。このボディはハウジングです。cv_markerはこのボディに属している必要があります。
- cv_markerの原点によって、2つのギア間の接触ポイントが定義されます。cv_markerのz軸によって、接触ポイントにおけるモーションの方向が定義されます。このz軸は、歯の力の方向も定義します。このz軸をさまざまな方向に向けることで、さまざまなタイプのギアをモデル化できます。
- 次の図は、ラックアンドピニオン拘束のcv_markerの位置と向きを示しています。
 図 2. cv_marker ラックアンドピニオンギアセットの定義
図 2. cv_marker ラックアンドピニオンギアセットの定義 - 次の図は、ウォームとウォームホイールからなるギアセットのcv_markerの位置と向きを示しています。ウォーム上のはすばによって、ホイールに回転運動が与えられます。
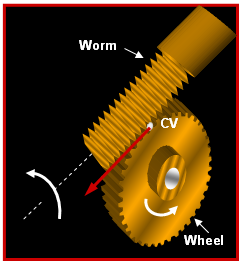 図 3. cv_marker ウォームとウォームホイールからなるギアセットの定義
図 3. cv_marker ウォームとウォームホイールからなるギアセットの定義