Force: Spring Damper
Model ElementForce_SpringDamperは、2つのReference_Marker間に作用するスプリングダンパ力を定義します。
説明
これは、並進要素(力を適用)または回転要素(トルクを適用)にすることができます。どちらの場合も、力は、剛性係数、減衰係数、自由長、およびプリロードによって表現されます。
フォーマット
<Force_SpringDamper
id = "integer"
[ label = "string" ]
i_marker_id = "integer"
j_marker_id = "integer"
type = { "TRANSLATIONAL" | "ROTATIONAL" }
stiffness = "real"
damping = "real"
length = "real"
preload = "real" >
</Force_SpringDamper>属性
- id
- 要素識別番号(整数 > 0)。この番号は、すべてのForce_SpringDamper要素の中で一意です。
- label
- Force_SpringDamper要素の名前。
- i_marker_id
- 力またはトルクが適用されるReference_Markerを指定します。これは力の作用点として指定されます。
- j_marker_id
- 反力または反トルクが適用されるReference_Markerを指定します。これは反力の作用点として指定されます。
- type
- Force_SpringDamperのタイプを指定します。“TRANSLATIONAL”または“ROTATIONAL”を選択します。
- “TRANSLATIONAL”
- この要素によって、2つのReference_Marker間に力が適用されることを意味します。トルクは適用されません。
- “ROTATIONAL”
- この要素によって、2つのReference_Marker間にトルクが適用されることを意味します。力は適用されません。
- stiffness
- スプリングの剛性を指定します。並進スプリングダンパの場合、これは単位並進たわみあたりの力の単位で表されます。回転スプリングダンパの場合、これはラジアンあたりのトルクの単位で表されます。stiffness ≥ 0であることに注意してください。負の値は許容されません。
- damping
- 減衰係数を指定します。並進スプリングダンパの場合、これは単位並進たわみ速度あたりの力の単位で表されます。回転スプリングダンパの場合、これは単位たわみ角速度あたりのトルクの単位で表されます。
- length
- スプリングの自由長または取り付け(参照)長さを指定します。
- preload
- スプリングダンパ内の任意のアセンブリまたはプリロードを指定します。これは、IマーカーとJマーカーの間の距離または角度がlengthで指定した値と等しい場合の力またはトルクです。
例
最初の例は、並進スプリングダンパをモデル化する方法を示しています。
半径0.0313m(約3cm)の鋼球が、スプリングダンパによって天井からつるされているとします。この球の質量は1kg、慣性はIxx=Iyy=Izz=4.89E-4 Kg.m2です。スプリングのプロパティは次のとおりです:
- 剛性 = 1200 N/m.
- 減衰 = 40Ns/m。
- 自由長 = 0.5m。
- プリロード = 300N
この球は、スプリングとの結合部分が天井から0.4mの距離になるまで、垂直に押し上げられます。その後、この球は放たれ、振動し始めます。このモデルを概略的に図1に示します。また、この球の揺動運動の結果例を示します。

図 1. 単純な並進スプリングダンパシステムとその応答
このシナリオのForce_SpringDamperモデリング要素は次のとおりです:
< Force_SpringDamper
id = "18"
i_marker_id = "22"
j_marker_id = "11"
type = "TRANSLATIONAL"
stiffness = "1200"
damping = "10"
length = "0.5"
preload = "300" >
</ Force_ SpringDamper >下の図は、2リンク(ダブル)の振り子の2番目の回転ジョイントに作用する回転スプリングダンパの使用を示しています。40rads/secの初期角速度により、システムが作動します。スプリングダンパのパラメータは図に示すとおりです。プロットは、スプリングダンパによって生成されたトルクを示します。

図 2. 回転スプリングダンパシステムとその応答
このモデルの回転スプリングダンパの定義は以下のとおりです:
<Force_SpringDamper
id = "18"
i_marker_id = "1029"
j_marker_id = "1039"
type = "ROTATIONAL"
stiffness = "500"
damping = "50"
length = "0.3"
preload = "0." >
</ Force_SpringDamper >コメント
- Force_SpringDamper(およびその他すべての力)で使用される記号の規則は次のとおりです:
- 正の力またはトルクは反発する向きになります。IとJのReference_Marker間の距離または角度が大きくなるような力またはトルクです。したがって、負の力は引き合う力となります。
- 角度は、J Reference_MarkerのX軸からI Reference_MakerのX軸へ、反時計回りで測定されます。下の図をご参照ください。αが測定される角度になります。

図 3. 角度の測定に使用される規則 - 下の図は、2つのボディ間で作用するForce_SpringDamperを示しています。回転Force_SpringDamperの挙動も同様で、共有する軸の周りの2つのボディの相対回転に対して作用するという点のみが異なります。
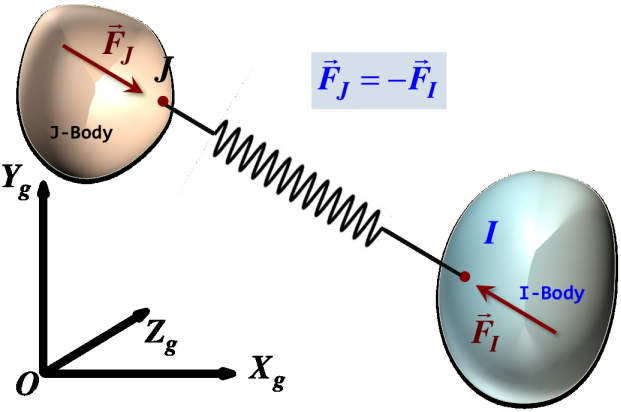
図 4. 並進スプリングダンパの力の法則 - 並進スプリングダンパの場合、シミュレーションにおいてスプリング長がゼロになると、常に力の方向は未定義となります。これは、IおよびJのReference_Markerの原点が重なり、スプリングが体積ゼロに押し縮められることに相当します。このような状態は物理的に現実的ではなく、回避する必要があります。
- 非線形の力特性を実装する場合は、Force_Scalar_TwoBodyモデリング要素を使用します。
- Force_SpringDamperは、すべてのタイプのボディ(Body_Rigid、Body_Flexible、およびBody_Point)に作用できます。