Point Mass
Model ElementBody_Pointは、MotionSolve内の質点エンティティを定義します。
説明
このエンティティには、質量プロパティはありますが、慣性プロパティはありません。質点の位置は、3つの並進座標によって表現されます。デフォルトでは、質点の方向は全体座標系と同じに設定されます。シミュレーションの間は変更されません。
Body_Point上のReference_Markerには、位置座標と方向座標が存在する場合があります。これらのReference_Markerの方向は、シミュレーションの間に変更されることはありません。
フォーマット
<Body_Point
id = "integer"
[ label = "string" ]
cg_id = "integer"
[ lprf_id = "integer" ]
mass = "real"
v_ic_x = "real"
v_ic_y = "real"
v_ic_z = "real"
v_ic_x_flag = { "TRUE" | "FALSE" }
v_ic_y_flag = { "TRUE" | "FALSE" }
v_ic_z_flag = { "TRUE" | "FALSE" }
</Body_Point>属性
- id
- 要素識別番号(整数 > 0)。この番号は、すべてのBody_Point要素の中で一意です。
- label
- Body_Point要素の名前。
- cg_id
- Body_Pointの質量中心に配置されるReference_Markerを指定します。
- lprf_id(省略可能)
- 局所パート参照マーカーを指定します。
- mass
- Body_Pointの質量を指定します。質量 > 0。
- v_ic_x
- 全体座標系のx軸に沿ったBody_Point CG Reference_Markerの初期並進速度を指定します。
- v_ic_y
- 全体座標系のy軸に沿ったBody_Point CG Reference_Markerの初期並進速度を指定します。
- v_ic_z
- 全体座標系のz軸に沿ったBody_Point CG Reference_Markerの初期並進速度を指定します。
- v_ic_x_flag
- x方向の速度が正確にわかっているのか単なる初期推測値なのかを示すブールフラグ。
- v_ic_y_flag
- y方向の速度が正確にわかっているのか単なる初期推測値なのかを示すブールフラグ。
- v_ic_z_flag
- z方向の速度が正確にわかっているのか単なる初期推測値なのかを示すブールフラグ。
例
3つのボディの問題は、動的システムにおける最も古い問題の1つです。この問題は、地球、月、太陽など、相互作用する3つの天体の質量の挙動を特定するというものです。この一般的な問題に対して閉形式解は見当たらないため、数値シミュレーションを実行してこの3つのボディの挙動を予測します。システムのスケールは、3つのボディを質点と見なせるようなものになります。
質量:
- 太陽の質量は1.988 × 1030kgです。
- 地球の質量は5.974 × 1024kgです。
- 月の質量は7.475 × 1022kgです。
地球の質量を質量単位として選択すると、次のようになります:
- 太陽の質量は3.328E+5です。
- 地球の質量は1.000です。
- 月の質量は1.251E-2です。
距離:
- 太陽から地球までの距離は1.496 x 108kmです。
- 月から地球までの距離は3.844 x 105kmです。
地球から月までの平均距離を距離単位として選択すると、次のようになります:
- 太陽から地球までの距離は389.2です。
- 月から地球までの距離は1.000です。
時間:
- 時間単位は1年(365日)に設定し、長期のシミュレーションを実行できるようにします。
初速度:
- 太陽に対する地球の速度は29.8km/ 秒です。これは、2.445 x 103月-地球距離 / 年と等価です。
- 地球に対する月の速度は3680km/ 時です。これは、83.86月-地球距離 / 年と等価です。
全体座標系は、太陽のCGに配置されます。シミュレーションの開始時点で、地球は全体座標系のX軸上にあるとします。月は、下の図に示すようにXY平面内にあるとします。
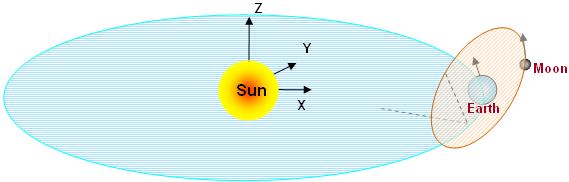
図 1. 太陽-地球-月のシステム
この単位系で太陽を定義するBody_Pointは次のようになります:
<Body_Point
id = "1"
cg_id = "11"
mass = "3.328E+5"
v_ic_x = "0.0"
v_ic_y = "0.0"
v_ic_z = "0.0"
v_ic_x_flag = "TRUE"
v_ic_y_flag = "TRUE"
v_ic_z_flag = "TRUE"
</Body_Point>この単位系で地球を定義するBody_Pointは次のようになります:
<Body_Point
id = "2"
cg_id = "21"
mass = "1.0"
v_ic_x = "0.0"
v_ic_y = "2.445E+3"
v_ic_z = "0.0"
v_ic_x_flag = "TRUE"
v_ic_y_flag = "TRUE"
v_ic_z_flag = "TRUE"
</Body_Point>コメント
- 物理学での質点は、問題に関係する他の距離に比べて非常に小さい寸法を持つボディを理想化したものです。その場合、ボディの内部構造は無視することができ、ボディはその質量が空間内の1点に集中しているように扱われます。
状況によっては、その寸法が無視できるほど小さくなくても、何らかの理由でボディが質点として扱われる場合もあります。例えば、球対称なボディ外の重力場は、ボディが中心に位置する質点(合計質量は同じで、重力の点源として作用)である場合と同じです。
- Body_Pointを、拘束や力要素のある別のボディ(質点体、弾性体、または剛体)と結合できます。Body_Pointに適用されるトルクは、Body_Pointのモーションに影響を及ぼさないため、無視されます。
- すべての拘束要素がサポートされています。いくつかの力要素はサポートされていません。これらは次のとおりです。Force_Beam、Force_Field