Sensor: Proximity
Model ElementSensor_Proximity要素は、2つのボディ間の最小間隔を監視するセンサーを定義します。このセンサーは、2つのボディの干渉状態、それらの最短距離、および最も近いポイントのペアの座標を追跡します。これらの量は、式を定義したり、プロットしたりするためのPROXIMITY関数を使用してアクセスできます。
フォーマット
<Sensor_Proximity
id = "integer"
[ label = "string" ]
num_i_graphics = "integer"
i_graphics_id = "integer_list"
num_j_graphics = "integer"
j_graphics_id = "integer_list"
/ >属性
- id
- 要素識別番号(整数 > 0)。この番号は、すべてのSensor_Proximity要素の中で一意であり、要素を一意に特定します。
- label
- Sensor_Proximity要素の名前。
- num_i_graphics
- 近接性を評価する際に考慮される、1つ目のボディ上のPost_Graphic要素の数を指定します。num_i_graphics > 0。
- i_graphics_id
-
これは、近接性で考慮される、1つ目のボディ上のPost_Graphic要素のIDのリストです。このリスト内のIDの数は、num_i_graphicsで指定されます。
- num_j_graphics
-
近接性を評価する際に考慮される、2つ目のボディ上のPost_Graphic要素の数を指定します。
num_j_graphics > 0。
- j_graphics_id
-
これは、近接性で考慮される、2つ目のボディ上のPost_Graphic要素のIDのリストです。このリスト内のIDの数は、num_j_graphicsで指定されます。
例
下の図は、Sensor_Proximity要素を使用して、ロボットのエンドエフェクターとワークピース間の最短距離を追跡する方法を示しています。
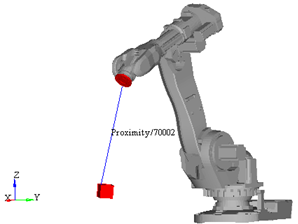
図 1. ロボットのエンドエフェクターとワークピース間の最短距離
<Sensor_Proximity
id = "70002"
num_i_graphics = "1"
i_graphics_id = "90013"
num_j_graphics = "1"
j_graphics_id = "90011"
/>コメント
- Sensor_Proximityは2つのボディ間の貫入は計算しません。これらの間の最短距離を計算するだけです。
- 次の表に、最短距離の計算でSensor_Proximity要素によってサポートされているグラフィックタイプを示します。
ボディのタイプ サポートされているグラフィック サポートされていないグラフィック 剛体 BoxDefinedFromCorner BoxDefinedFromCenter
Cylinder
Frustum
Ellipsoid
Sphere
Plane
Triamesh
CircleFromRM CircelFromRadius
ArcFromRM
ArcFromRadius
Point
LineMesh
SPDP
Outline
ParamCurve
ParamSurface
DeformCurve
DeformSurface
UserGra
弾性体 弾性体は近接性の計算ではサポートされません。