OS-T:2030 型抜き方向制御を伴うコントロールアーム
本チュートリアルでは、コントロールアームに型抜き方向の制約条件をつけてトポロジー最適化を実施します。
Figure 1が、設計領域(茶色)および非設計領域(青色)を含む有限要素メッシュのモデルを表したものです。
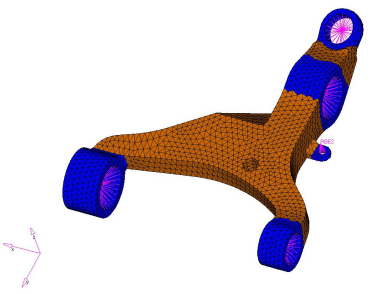
図 1. コントロールアームモデル
図 1. コントロールアームモデル
HyperMeshの起動とOptiStructユーザープロファイルの設定
モデルのオープン
最適化のセットアップ
トポロジー設計変数の作成
- Analysisページからoptimizationをクリックします。
- topologyをクリックします。
- createサブパネルを選択します。
- desvar=欄にdv1と入力します。
- type:をPSOLIDにセットします。
- プロパティセレクターを使って、Designを選択します。
- createをクリックします。
型抜き制約条件の作成
最適化の応答の作成
- Analysisページからoptimizationをクリックします。
- Responsesをクリックします。
-
体積率の応答を作成します。
- responses=欄に、Volfracと入力します。
- response typeの下で、volumefracを選択します。
- regional selectionをby entityとno regionidに設定します。
- createをクリックします。
-
重み付けコンプライアンスの応答を作成します。
- responses=欄に、Comp1と入力します。
- response typeの下で、weighted compを選択します。
- loadstepsをクリックし、すべての荷重ステップを選択します。
- returnをクリックします。
- createをクリックします。
- returnをクリックし、Optimization panelに戻ります。
設計制約条件の作成
- dconstraintsパネルをクリックします。
- constraints=欄にConstrと入力します。
- response =をクリックしVolfracを選択します。
- upper boundの横のボックスにチェックマークを入れ、0.3と入力します。
- createをクリックします。
- returnをクリックし、Optimization panelに戻ります。
目的関数の定義
- objectiveパネルをクリックします。
- minが選択されていることを確認します。
- response=をクリックし、Complを選択します。
- createをクリックします。
- returnを2回クリックし、Optimization panelを終了します。
最適化の実行
ディレクトリ内に作成されるデフォルトのファイルは以下の通り:
- controlarm_opt.hgdata
- 各反復計算における目的関数、制約条件の違反率が納められているHyperGraph形式のファイル。
- controlarm_opt.hist
- 目的関数の各反復計算の履歴および最も違反している制約値が納められているOptiStruct反復計算履歴ファイル。反復計算履歴のxyプロットに使用可能。
- controlarm_opt.HM.comp.tcl
- 密度の結果値に基づいて要素をコンポーネントに分類するために使用されるHyperMeshコマンドファイル。このファイルは、OptiStructのトポロジー最適化を実行した場合にのみ使用されます。
- controlarm_opt.HM.ent.tcl
- 密度の結果値に基づいて要素をエンティティセットに分類するために使用されるHyperMeshコマンドファイル。このファイルは、OptiStructのトポロジー最適化を実行した場合にのみ使用されます。
- controlarm_opt.html
- 問題設定と最終反復計算結果のサマリーを含むHTML形式の最適化レポート。
- controlarm_opt.mvw
- HyperViewセッションファイル。
- controlarm_opt.oss
- デフォルトで密度のしきい値が0.3として定義されているOSSmooth用のファイル。このファイル内のパラメーターを調整することでユーザーの意図する結果を得ることができます。
- controlarm_opt.out
- ファイルのセットアップ、最適化のセットアップの情報、 実行に必要なRAMとディスクスペースの見積もり、それぞれの最適化の反復情報、計算時間の情報を含むOptiStruct出力ファイル。controlarm_opt.femファイルの処理を行う際にフラグが立つワーニングおよびエラーに関しては、このファイルを確認すること。
- controlarm_opt.res
- HyperMeshバイナリ結果ファイル。
- controlarm_opt.sh
- 反復計算が終了した段階での形状データが納められているファイル。各要素の密度値、空孔の大きさと角度を含む。このファイルは、最適化計算のリスタートに使用することができます。
- controlarm_opt.stat
- 計算を完全に終了するために使用されたCPU、また、入力デックの読み出し、アセンブリ、解析および収束等のCPU情報が含まれています。
- controlarm_opt_des.h3d
- 最適化結果を含むHyperViewバイナリ結果ファイル。
- controlarm_opt_frame.html
- ブラウザを使ってHyperView Playerで.h3dをポスト処理するために使用されるHTMLファイル。_menu.htmlファイルとリンクされている。
- controlarm_opt_hist.mvw
- 目的関数、制約条件、および設計変数の反復計算履歴が含まれています。このファイルはHyperGraph、HyperViewおよびMotionViewでカーブをプロットするために使用できます。
- controlarm_opt_menu.html
- ブラウザを使ってHyperView Playerで.h3dをポスト処理するために使用されるHTMLファイル。
- controlarm_opt_s#.h3d
- 線形静解析からの結果を含むHyperViewバイナリ結果ファイル。
結果の表示
要素密度の結果はすべての反復計算について、OptiStructからcontrolarm_opt_des.h3dファイルに出力されます。また、変位および応力の結果は、デフォルトで最初と最後の反復計算の各サブケースについて、controlarm_opt_s#.h3dファイルに出力されます(#はサブケースID)。
要素密度のコンタープロットの表示
- OptiStructパネルから、HyperViewをクリックします。
- Resultsブラウザから、最終反復計算を選択します。
-
Resultsツールバーで
 をクリックし、Contour panelを開きます。
をクリックし、Contour panelを開きます。
- Result typeの下で、Element densities (s)およびDensityを選択します。
- Averaging MethodをSimpleに設定します。
- Applyをクリックします。
結果のコンターは与えられた荷重と境界条件に対する変位場を示します。
このモデルでは、メッシュを改良することで、より離散的な解が得られるはずですが、本チュートリアルについては、現状のメッシュと結果で満足するものとします。
密度のアイソバリュープロットの設定
-
Resultsツールバーで
 をクリックし、Iso Valueパネルを開きます。
をクリックし、Iso Valueパネルを開きます。
-
Clipped geometryの下で、FeaturesとTransparentを選択します。
図 2. 
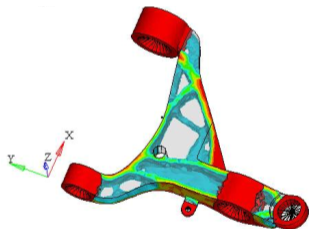
図 3. 要素密度のアイソサーフェスプロット
応力と変位のコンタープロットの表示
-
アプリケーションの上部右側で
 をクリックし、page 3のLoad Case 1の結果に移動します。
をクリックし、page 3のLoad Case 1の結果に移動します。
-
Animationツールバーで、アニメーションモードを
 (Linear Static)に設定します。
(Linear Static)に設定します。
-
Resultsツールバーでをクリックし、Contour panelを開きます。
-
Resultsブラウザで、反復計算を最終反復計算に設定します。
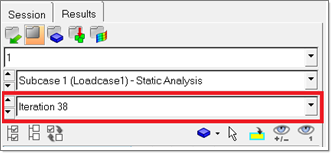
図 4. 最終反復計算の変位のプロット最終反復計算の変位のプロットが表示されます。対応する反復計算について、応力結果も表示されます。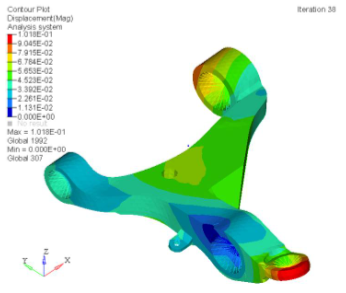
図 5. 最終反復計算における1つ目の荷重ステップの変位コンター -
同様に、page 4のLoad Case 2の結果を確認します。
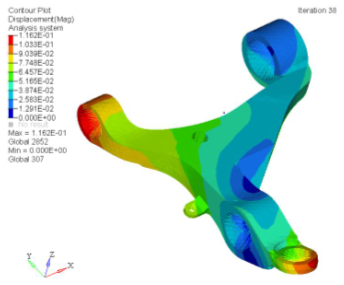
図 6. 最終反復計算における2つ目の荷重ステップの変位コンター