OS-T:1950 曲線-曲線拘束
本チュートリアルでは、HyperMeshを使ってCVCV(曲線-曲線)ジョイントをモデル化する方法について学びます。
CVCV(曲線-曲線)ジョイントは、ハイヤーペア拘束です。この拘束は、別のボディ上のカーブ上を回転およびスライドする1つのボディ上のカーブから成ります。カーブは同じ平面上になくてはなりません。この拘束は、接触が1つの平面内で起こる数多くのケースにおける接触のモデリングの代替として機能し得ます。このような場合の1つが、湾曲した五角形が園内で回転し、スライダーを並進させる湾曲五角形確動カムシステムです。五角形と円との間を接触でモデル化する代わりに、両者の間にCVCV拘束を指定します。
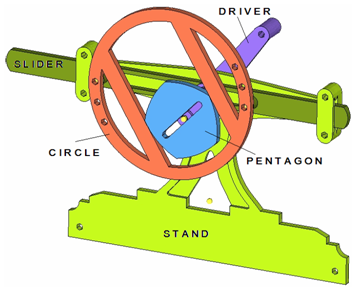
図 1. 剛体モデル
図 1. 剛体モデル
本チュートリアルでは、CVCV拘束を援用して、湾曲した五角形確動カムシステムがモデル化されます。
HyperMeshの起動とOptiStructユーザープロファイルの設定
モデルのオープン
モデルのセットアップ
剛体(PRBODY)の生成
PRBODYは、マルチボディシミュレーションのための剛体定義です。PRBODYは剛体を、有限要素のプロパティ、要素、節点のリストとは別に定義します。
モデルには、ground bodyとは別に、スタンド、スライダー、ドライバー、ペンタゴン、サークルの5つのボディがあります。事前定義された自由節点が、これらのボディとジョイントの定義に用いられます。
ジョイントの作成
ここでは、このモデルに必要な全てのジョイントを作成します。
DOF = 5*6 - (5+5+6+6+5+1) = 2
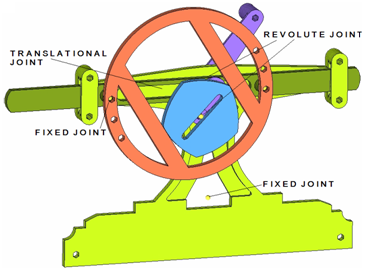
図 2. モデル中のジョイント位置
| ジョイントタイプ | 並進自由度の除去 | 回転自由度の除去 | 自由度の除去総数 |
|---|---|---|---|
| 回転(Revolute) | 3 | 2 | 5 |
| 固定(Fixed) | 3 | 3 | 6 |
| 並進(Translational) | 2 | 3 | 5 |
| Motion (rev) | 3 | 2 | 1 |
図 2. モデル中のジョイント位置
モーションの拘束の定義
-
dof5を除くすべての自由度からチェックマークを外します。dof=欄に1と入力します。

図 3. Constraints パネル - Motion
荷重コレクターの作成
モデルに与える重力荷重とマルチボディシミュレーション用パラメータを指定するためのMBSIMバルクデータカードをこの演習で作成します。
-
以下に示す値を入力します。
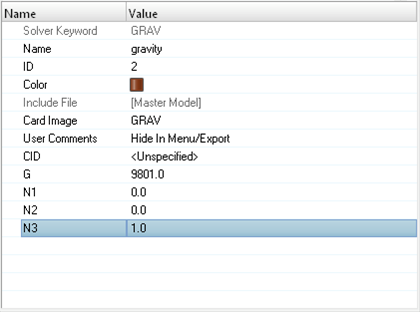
図 4. -
もう1つの荷重コレクターを作成します。
-
以下に示す値を入力します。
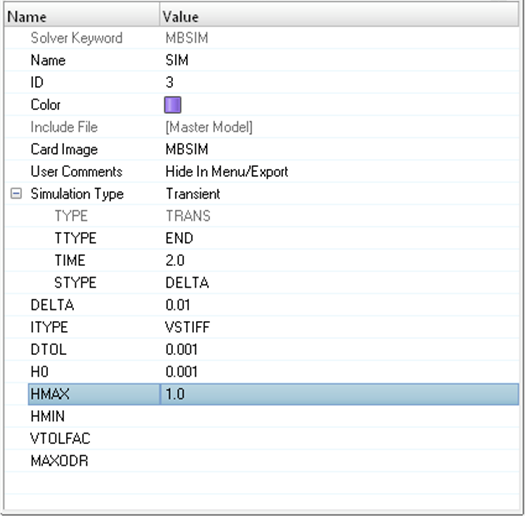
図 5.
-
以下に示す値を入力します。
荷重ステップの作成
ジョブのサブミット
-
AnalysisページからOptiStructパネルをクリックします。
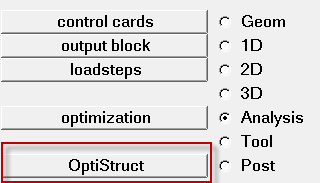
図 6. OptiStructパネルへのアクセス
そのディレクトリに書かれるデフォルトのファイルは:
- for_cvcv_tutorial.html
- 問題の定式と解析結果のサマリーに関する解析のHTMLレポート。
- for_cvcv_tutorial.out
- ファイルの設定、最適化問題の設定、実行に必要なRAMおよびディスクスペースの推定量、各最適化反復計算の情報、解析時間等、特定の情報を含むOptiStructの出力ファイル。ワーニングおよびエラーに関しては、このファイルを確認すること。
- for_cvcv_tutorial.h3d
- HyperViewバイナリ結果ファイル。
- for_cvcv_tutorial.res
- HyperMeshバイナリ結果ファイル。
- for_cvcv_tutorial.stat
- 解析のプロセスの間のそれぞれのステップでのCPU情報を提供する、解析のプロセスの要約。
結果の表示
このステップでは、HyperMeshのOptiStructパネルで起動するHyperView内で結果を可視化します。
HyperViewは有限要素解析(FEA)、マルチボディシステムシミュレーション、ビデオと工学データのための完全なポストプロセッシングと表示の環境です。
-
Contour panelツールバーアイコン
 をクリックします。
をクリックします。
-
playback controlsの横のパネル内にあるAnimation Controlsを使ってアニメーションを開始 / 停止します。

図 7.-
Animate Modeが
 (Transient)にセットされていることを確認します。
(Transient)にセットされていることを確認します。
- Start/Pause Animationアイコンをクリックし、アニメーションを開始します。
- アニメーションの再生中に、一番下のスライダを使って、アニメーションのスピードをコントロールします。
- Start/Pause Animationアイコンを再度クリックし、アニメーションを停止します。
-
Animate Modeが