フリー形状最適化
Altair Engineering, Inc.によって開発された独自仕様の特性最適化テクニックを使用します。フリー形状最適化には、従来のタイプとフリー形状の頂点モーフィングの2つのタイプがあります。
フリー形状最適化の本質的な観念は、他の形状最適化技術とは異なり、外側境界(形状輪郭線)の許容動作(変形)は自動的に決定され、形状基底ベクトルを定義するユーザーの負担を軽減します。
- 従来のフリー形状最適化(TYPE=CLASSIC)
フリー形状設計領域は、構造(シェル構造のエッジまたはソリッド構造のサーフェス)上の節点によって認識されます。これらの節点は、DSHAPEエントリ上でリストされます。
構造の外側境界は、予め定義された目的関数および制約条件を満たすように変更されます。これらの設計節点が下記のいずれかの方法で動くことができます:- シェル構造の場合: 節点は接平面内のサーフェスエッジに垂直に動きます。
- ソリッド構造の場合: 節点はサーフェスに垂直に動きます。
フリー形状最適化の間に、法線方向は構造の形状変化と共に変化し、各繰り返し計算で、設計節点は更新された法線に沿って動きます。
- フリー形状の頂点モーフィング最適化(TYPE=VERTEXM)
形状の頂点モーフィング最適化は、Bletzinger博士とその共同研究者によって導入されました。1 この方法では、すべてのFEメッシュ節点の頂点が設計変数として扱われます。ユーザー定義のフィーチャーサイズ半径内で機能結合節点をフィルタリングすることにより、形状が平滑化されます。CLASSICの定式化に比べ、GRIDオプションでは設計自由度が大きく高まります。また、シェル構造の平面内形状の変化のみに対応可能という従来のフリー形状定式化での制限も解除されます。ただし、関与する設計変数の数が非常に多くなるため、VERTEXM手法の計算の手間が非常に大きくなる可能性があります。この定式化では、随伴法による感度解析が導入されています。したがって、ユーザーは、含めるアクティブな制約条件の数を、トポロジー最適化の適用と同程度にすることが重要です。
フリー形状の頂点モーフィング最適化では、最適化設計空間を次のように定義できます:- シェルの場合 – 設計空間全体の節点を選択できます。シェル設計領域のエッジ節点のみにする必要はありません。
- ソリッドの場合 – 節点は、ソリッド設計空間のサーフェスで選択する必要があります。内部節点が選択されても、これらは設計変数の作成で無視されます。 注: 内部ソリッド節点のみが選択されている稀なケースでは、実行がエラーになります。
フリー形状設計領域の定義
理想的には、フリー形状設計領域は、構造の形状が関連する応答に最も影響を及ぼすと仮定し得る箇所に選択されるべきです。
例えば、目的関数が応力の低減である場合、応力の大きい領域の節点を選択するのは適切です。
フリー形状設計領域は、形状が独立して変化することが望ましい構造上の異なる位置に定義されるべきです。ソリッド構造については、特徴線がフリー形状設計領域の自然境界を定義する場合が多くあります。フリー形状設計領域内に特徴線を含むことは、最適化中に特徴線をスムーズ化することを目的にしていない限り、避けるべきです。同様にシェル構造においても、鋭角コーナーをスムーズ化する意図がない限り、フリー形状設計領域内に鋭角コーナーを含むべきではありません。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| GRID | GID1 | GID2 | GID3 | GID4 | GID5 | GID6 | GID7 | ||
| GID8 | GID9 | 同様 | 同様 | ||||||
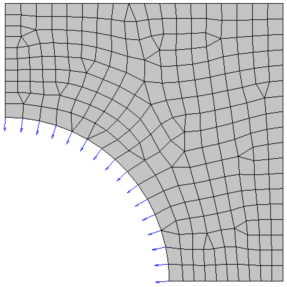
図 1.
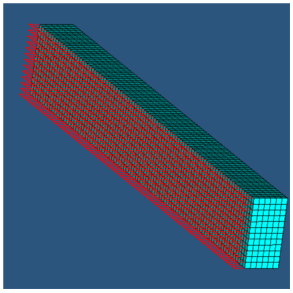
図 2.
フリー形状パラメータ
フリー形状設計領域が変形する方法に影響を及ぼすパラメーターには、方向タイプ、移動係数、メッシュスムージングのための層数、縮小の最大値および拡大の最大値の5つがあります。
方向タイプ
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| PERT | DTYPE | MVFACTOR | NSMOOTH | MXSHRK | MXGROW | SMETHOD | NTRANS |
- GROW
- 節点は、初期製品境界の内側に動くことができません。
- SHRINK
- 節点は、初期製品境界の外側に動くことができません。
- BOTH
- 節点は制約されません。
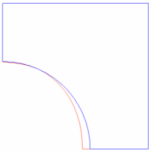
図 3. GROW

図 4. SHRINK

- 変形前

- 変形後
移動係数
MVFACTOR * mesh_size- "
mesh_size" - 同じDSHAPEカード内で定義されている設計領域の平均メッシュサイズです。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| PERT | DTYPE | MVFACTOR | NSMOOTH | MXSHRK | MXGROW | SMETHOD | NTRANS |
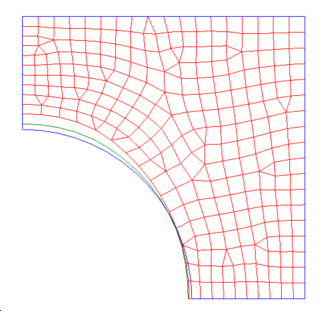
図 6.

- 変形前の形状

- MVFACTOR = 0.5(デフォルト)での反復計算1における形状

- MVFACTOR = 1.0での反復計算1における形状
メッシュスムージングのための層数
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| PERT | DTYPE | MVFACTOR | NSMOOTH | MXSHRK | MXGROW | SMETHOD | NTRANS |
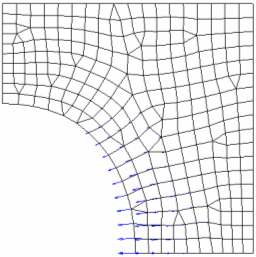
図 7. =5: 5層の節点群が設計境界に沿って動きます
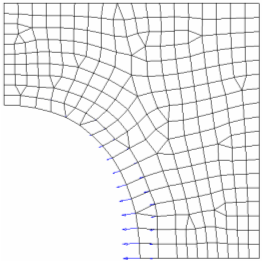
図 8. =1: 1層の節点群のみが設計境界に沿って動きます
縮小と拡大の最大値
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| PERT | DTYPE | MVFACTOR | NSMOOTH | MXSHRK | MXGROW | SMETHOD | NTRANS |
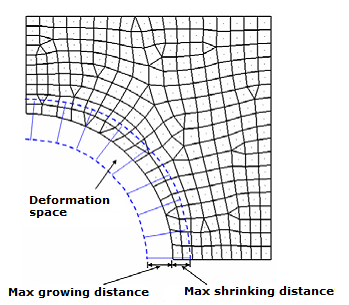
図 9. 最大拡大/縮小距離によって定義された変形空間
詳細および例については、後述のメッシュバリア制約条件の項をご参照ください。
遷移ゾーン内の節点に対する付加的な取り扱い
システムのサーフェスまたはエッジ全体が設計ゾーンではなく、設計領域と非設計領域の両方が相互に隣接して存在している場合、遷移を滑らかにするために役立つNTRANSを使用して、遷移ゾーンを定義できます。設計領域では最適化中に急激な変化が発生する可能性があり、非設計領域に最も近い設計領域のセクションが遷移ゾーンに指定されます。そこでは、設計領域から非設計領域への滑らかな遷移が可能になるように、隣接する非設計領域の対応する位置が考慮されます。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| PERT | DTYPE | MVFACTOR | NSMOOTH | MXSHRK | MXGROW | SMETHOD | NTRANS |
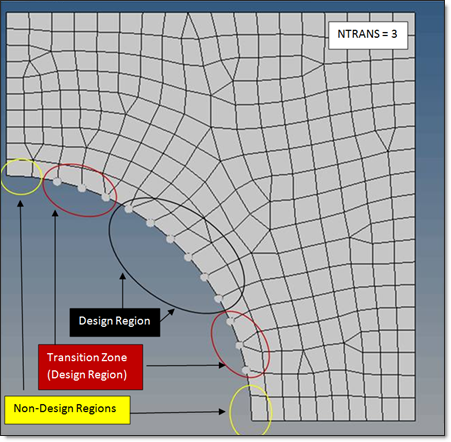
図 10. 設計領域と非設計領域の間の滑らかな遷移のための遷移ゾーンの節点の定義(NTRANS=3)
- 非設計節点(黄色い円で表示)。これはフリー形状最適化の間には移動しません。
- 遷移ゾーン内の設計節点遷移ゾーン内の設計節点(赤色の円で囲まれてハイライト表示された節点で、NTRANS=3によって定義される)
- 遷移ゾーン以外の設計節点(黒色の円で囲まれてハイライト表示された節点)

図 11. 設計領域と非設計領域の間の滑らかな遷移のための遷移ゾーンの節点の定義(NTRANS=3)
設計領域内の節点の制約
フリー形状設計領域内のいくつかの節点について追加の制約条件を特定することは可能です。
- FIXED
- フリー形状最適化の故に、節点は動くことができません。
- DIR
- 節点は、指定されたベクトルに沿って動くよう強制されます。
- NORM
- 節点は、指定したベクトルが法線方向を定義するプレーン上に留まるよう強制されます。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| GRIDCON | GCMETH | GCSETID1 / GDID1 |
CTYPE1 | CID1 | X1 | Y1 | Z1 | ||
| GCMETH | GCSETID2 / GDID2 |
CTYPE2 | CID2 | X2 | Y2 | Z2 |
例: CTYPE=VECTOR
この例は、予め定義された方向に節点が動くよう強制するために"DIR"制約タイプを使う必要のある簡単なケースを説明するものです。
図 12.
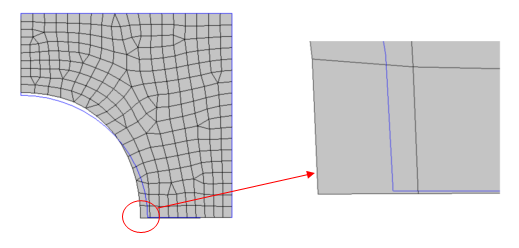
図 13.
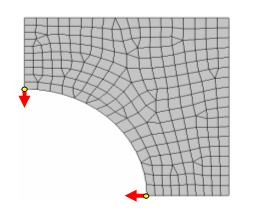
図 14.
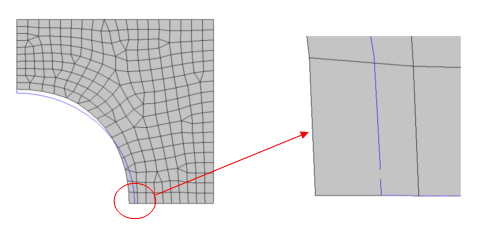
図 15.
例: CTYPE=PLANAR
図 16.
図 17.
図 18.
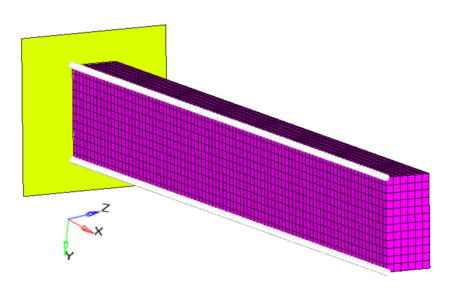
図 19.
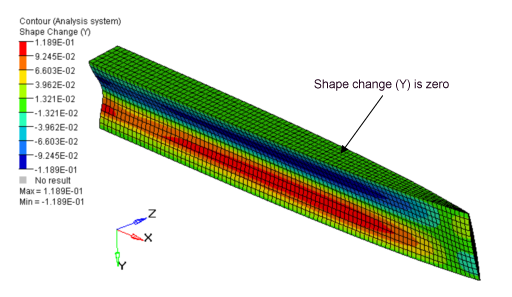
図 20.
1 Plane対称性制約条件
この制約条件の利点は、初期メッシュ、荷重または境界条件に関係なく、対照的な設計が可能になる点です。
対称性のある設計を行うことが求められる場合がよくあります。荷重および境界条件が完全に対称であっても、結果の設計が完全に対称であることは保証できません。対称設計を確実にするには、対称性制約条件を定義する必要があります。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| PATRN | TYP | AID/ XA |
YA | ZA | FID/ XF |
YF | ZF |
例:2次元の1-plane対称性制約条件の例
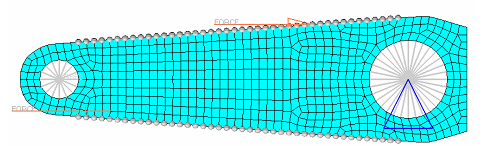
図 21. フリー形状設計節点を示す2次元モデル
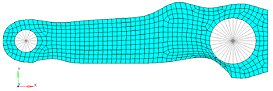
図 22. 対称性制約条件を用いない場合の結果
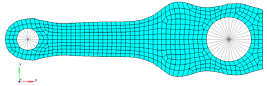
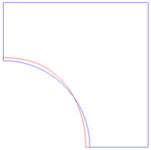
図 23. 対称性制約条件(XZ面)を用いた場合の結果
例:3次元の1-plane対称性制約条件の例
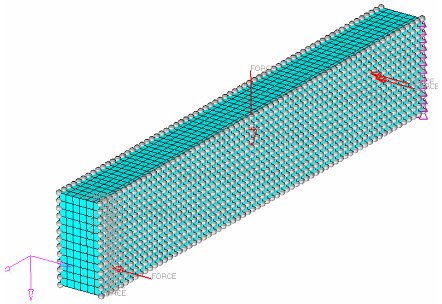
図 24. フリー形状設計節点を示す3次元モデル
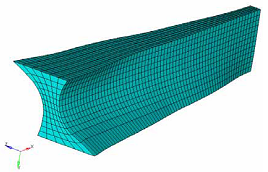
図 25. 対称性制約条件を用いない場合の結果
図 26. 対称性制約条件(XZ面)を用いた場合の結果
押し出し制約条件
フリー形状最適化で押し出しの製造性制約条件を適用することにより、初期メッシュ、荷重、境界条件に関係なく、一定の断面を持つソリッドモデルの設計が可能です。
指定したパスに沿って一定の断面を持つような設計を生成することが必要な場合がよくあります。特に、押し出しプロセスで製造する部品がこの状況に該当します。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| EXTR | ECID | XE | YE | ZE |
フリー形状最適化には、直線と円形の2つの押し出しパスタイプがあります。
例:直線に沿った押し出し制約条件
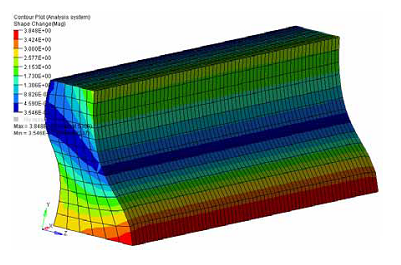
図 27. 押し出しパス(X軸に沿った)を用いた結果
例:円形パスに沿った押し出し制約条件
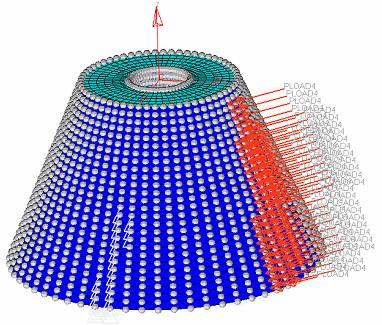
図 28. フリー形状設計節点を示すモデル
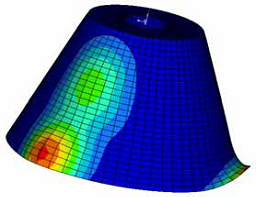
図 29. 押し出しパスを用いない場合の結果
図 30. 押し出しパス(円形)を用いた場合の結果
型抜き方向制約条件
型抜き方向制約条件は、最適化された形状でダイを指定の方向にスライドさせることが可能となるよう、設計領域について定義することができます。
鋳造プロセスでは、ダイのスライド方向に開かずに並んでいる空洞状の形状というものは実現不可能です。各設計領域(各DSHAPEカードで定義)について1つのダイのみが考慮され、非設計領域はこの制約条件について考慮されません。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| DRAW | DTYP | DAID/ XDA |
YDA | ZDA | DFID/ XDF |
YDF | ZDF |
例:型抜き方向制約条件
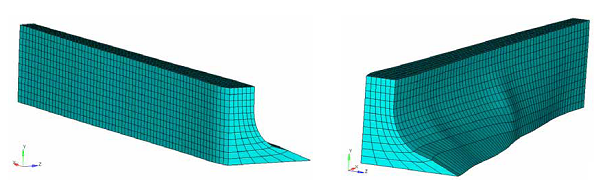
図 31. 型抜き制約条件(Y軸に沿った)を用いた場合の結果
例:1-plane対称性制約および型抜き方向制約を組み合わせた例
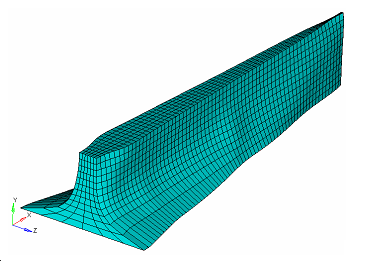
図 32. 型抜き方向制約(Y軸)と対称性制約(XY面)を共に用いた場合の結果
側面制約条件
側面制約条件では、変形空間を成分の範囲として定義できます。
PERT継続行で定義される最大縮小および最大拡大パラメータと同様、側面制約条件によって設計領域の変形の総量を制限することが可能です。側面制約条件では、変形空間を成分の範囲、すなわち(x1, y1, z1)および(x2, y2, z2)として定義することが可能です。これらの範囲は、直交、円筒または球座標系のいずれかに関してです。
例:側面制約条件
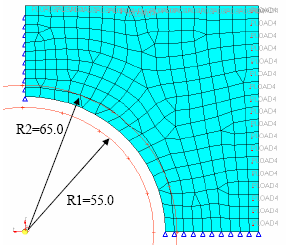
図 33. 半径R1およびR2(円形座標系の1方向)により定義された側面制約条件を示すモデル
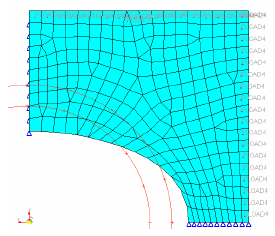
図 34. 側面制約条件を用いない場合の結果
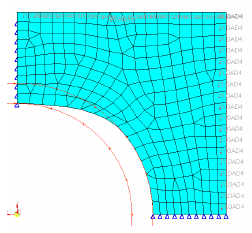
図 35. 側面制約条件を用いた場合の結果
メッシュバリア制約条件
メッシュバリアは特別なシェル要素群(BMFACE)で構成され、計算の手間を最小限に留めるため、その定義には出来る限り少数の要素が使用されるべきです。
縮小および成長パラメーターと側面制約条件は別として、設計領域の変形の総量を制限するためのより一般的な機能は、メッシュバリア制約条件を定義することにより利用できます。
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| BMESH | BMID |
例:メッシュバリア制約条件
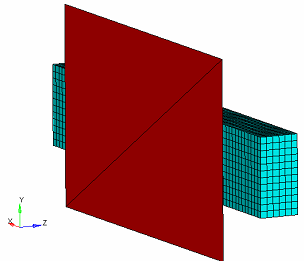
図 36. メッシュバリアを有したモデル
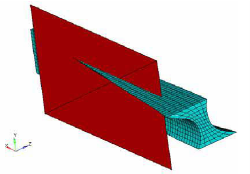
図 37. メッシュバリア制約条件を用いない場合の結果

図 38. メッシュバリア制約条件を用いた場合の結果
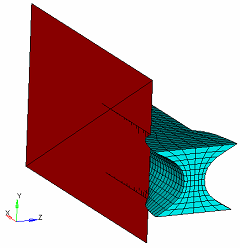
図 39. メッシュバリア制約条件と1-plane対称性制約条件を組み合わせて用いた場合の結果
これらの結果より、メッシュバリアがどのようにモデルの変形を制約するかを確認することができますが、メッシュバリアが十分大きくない場合、設計領域の変形はこの制限を越えては制約されません。
例:最大縮小および拡大パラメータ
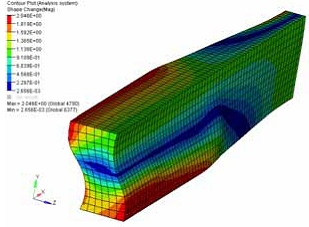
図 40. 縮小および拡大パラメータを用いた場合の結果. 最大拡大距離 = 2.0; 最大縮小距離 = 2.0
図 41. 縮小および拡大パラメータと1-plane対称性制約条件(XZ-面)を用いた場合の結果. 最大拡大距離 = 2.0; 最大縮小距離 = 2.0
コメント
- 複数の制約条件が同じ設計領域について定義されている場合、最適化エンジンは、異なるすべての制約条件を満足するようベストを尽しますが、それらすべての条件を整合させることができない場合もあります。
- メッシュバリア、最大拡大および縮小、または側面制約などの制約条件が構造パート間の干渉を回避するために適用される場合、ユーザーは、製造上の許容値および構造変形のもとで、余裕が保証されるよう制約条件を定義する必要があります。すなわち、バリアのサーフェスは、干渉する可能性のあるパートからのオフセットを含まなくてはなりません。