OS-T:1930 MotionSolveで使用するための弾性体の作成
本チュートリアルでは既存の有限要素モデルを使用し、MotionSolve用に弾性体を作成します。モデルはOptiStructで実行します。
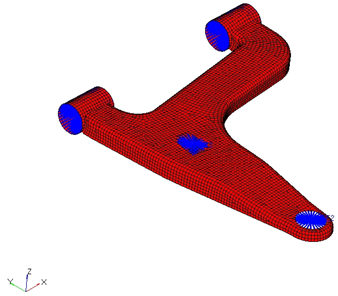
図 1.
HyperMeshの起動とOptiStructユーザープロファイルの設定
モデルのオープン
モデルのセットアップ
弾性体縮退を実行するための荷重コレクターの作成
荷重タイプの変更
- Analysisページからパネルload typesをクリックします。
- をクリックします。
- returnをクリックします。
ASETの作成
- ModelブラウザのLoad CollectorsフォルダーでASETを右クリックし、コンテキストメニューからMake Currentを選択します。
- メニューバーからを選択し、Constraintsパネルを開きます。
-
1つ目の制約条件を作成します。
-
dof1、dof2およびdof3の自由度を選択します。
ヒント: チェックの入った(選択されている)ボックスを右クリックし、自由度を選択解除します。

図 2.
-
dof1、dof2およびdof3の自由度を選択します。
-
2つ目の拘束条件を作成します。
- 自由度dof2とdof3を選択します。
- 節点セレクターを使って、その節点とコントロールアームの最後の接続点を選択します。
- createをクリックします。
-
3つ目の拘束条件を作成します。
- 自由度dof3を選択します。
- 節点セレクターを使って、ショックアセンブリの底をコントロールアームにしっかり留める剛体内の一番上の節点を選択します。
- createをクリックします。
-
4つ目の拘束条件を作成します。
- 自由度dof1、dof2、およびdof3を選択します。
- 節点セレクターを使って、ボスの右側の一番上の節点を選択します。
- createをクリックします。
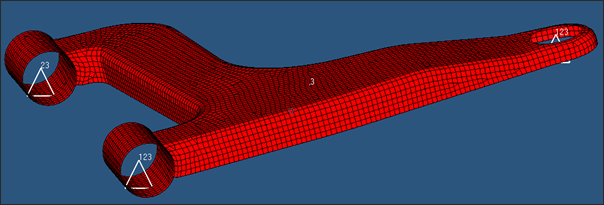
図 3. コントロールアームモデルに付与された拘束条件
サブケースの作成
- からをクリックし、Control Cardsパネルを開きます。
- GLOBAL_CASE_CONTROLをクリックします。
- CMSMETHを有効にします。
- CMSMETHをクリックし、荷重コレクターCMSを選択します。
- returnをクリックし、Control Cardsパネルに戻ります。
出力リクエストの定義
-
解析タイプを定義します。
-
下に示されたようにオプションを選択します。

図 4.
-
下に示されたようにオプションを選択します。
-
部分モード合成の出力コントロールを作成します。
-
下に示されたようにオプションを選択します。
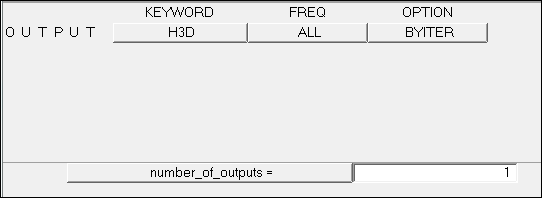
図 5.
-
下に示されたようにオプションを選択します。
ジョブのサブミット
-
AnalysisページからOptiStructパネルをクリックします。
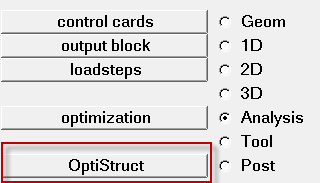
図 6. OptiStructパネルへのアクセス
そのディレクトリに書かれるデフォルトのファイルは:
- susp_sla.html
- 問題の定式と解析結果のサマリーに関する解析のHTMLレポート。
- susp_sla.out
- ファイルの設定、最適化問題の設定、実行に必要なRAMおよびディスクスペースの推定量、各最適化反復計算の情報、解析時間等、特定の情報を含むOptiStructの出力ファイル。ワーニングおよびエラーに関しては、このファイルを確認すること。
- susp_sla.h3d
- HyperViewバイナリ結果ファイル。
- susp_sla.res
- HyperMeshバイナリ結果ファイル。
- susp_sla.stat
- 解析のプロセスの間のそれぞれのステップでのCPU情報を提供する、解析のプロセスの要約。