等価静的荷重法(ESLM)
動的荷重のかかった設計の最適化に適したテクニックです。
- 弾性体を含むマルチボディダイナミクス問題
- 陰解法静解析、陰解法動解析および陽解法動解析からの非線形応答
等価静的荷重法は、OptiStructの秀逸な静的応答最適化能力を利用しています。
等価静的荷重

図 1. 変位 - 時刻歴応答
等価静的荷重は、指定されたタイムステップにおける動的/非線形解析の荷重と同じ応答フィールドを生成する荷重です。図 1より、等価静的荷重は、ソリューションの時刻歴内の各タイムステップに対応し、静的環境内でのシステムの動的/非線形挙動を再現して計算されます。

図 2. 等価静的荷重法
OptiStructでは、等価静的荷重法は完全に自動化されており、過渡、動的、および非線形ソリューションからの応答の最適化に効率的なアプローチです。
- 概念設計段階、および設計の微調整の段階で適用することが可能。すなわち、トポロジー、フリー寸法、トポグラフィー、寸法、形状およびフリー形状最適化に使用できます。
- 設計は、最適化プロセス中に、更新された設計により更新された荷重について最適化されます
ESL最適化の収束基準
- 2つの外部ループ間の最も大きな制約条件の違反と最大目的関数値の両方に変化がない
- 2つの外部ループ間の最も大きな制約条件の違反と最大目的の両方に進展がない
- 先行する6つの目的関数値が最適値前後を行ったり来たりしている
マルチボディダイナミクスのための等価静的荷重法
等価静的荷重法(ESLM)は、弾性体を含んだマルチボディダイナミクス問題の解析用として装備されました。
寸法、形状、フリー形状、トポロジー、トポグラフィー、フリー寸法、および材料最適化が弾性体に適用可能です。応答は、質量、体積、重心、慣性モーメント、応力、ひずみ、コンプライアンス(ひずみエネルギー)および弾性体の変位です。変位の応答は、弾性体に定義された局所境界条件について考慮されます。応答はDRESP1、DRESP2およびDRESP3バルクデータエントリを使用して定義します。応答は、参照として弾性体に含まれるプロパティ、要素および節点を使って、弾性体についてのみ定義できます(PFBODY)。設計変数は、DESVAR, DVPREL1、DVPREL2、DVMREL1、DVMREL2、DSHAPE、DTPL、DTPG、DSIZEおよびDVGRIDバルクデータエントリを使って定義されます。フリー寸法最適化は現時点ではDSIZEカード上でPTYPE=PSHELLである場合にのみ使用できます。設計変数は、参照として弾性体に含まれるプロパティを使って、弾性体についてのみ定義できます(PFBODY)。制約条件は、DCONSTR、DCONADDおよびDOBJREFバルクデータエントリを使って定義します。制約条件と目的関数は、マルチボディダイナミクスサブケース内で、もしくはDESOBJ、DESSUB、DESGLBおよびMINMAXをそれぞれ介して全体的に参照されます。
ESLM固有のパラメーターは、DOPTPRMバルクデータエントリを介して設定することが可能です(パラメータ)。
手法
- 等価静的荷重
- 変形
- 加速度
- 速度
- 外部荷重
- Step 1
- 初期設計
- Step 2
- 動解析
- Step 3
- 複数の等価静的荷重セットから成る複数のサブケースを含んだ静的応答最適化
- Step 4
- 設計が収束した場合は終了。収束しない場合はStep 2に戻る。
Step 3における反復計算は内部反復、Step 2からStep 4までは外部ループと呼ばれます。Step 3で収束したソリューションは、次の外部ループの開始ポイントとなります(現在の外部ループで設計が収束しない場合)。Step 2においてマルチボディダイナミクス解析にタイムステップが存在する場合、静的応答最適化内のサブケースは、Step 3で生成されます(タイムステップスクリーニングオプションが非アクティブである場合)。パラメータをご参照ください。
構造解析および最適化用の境界条件
ESL法で構造最適化を行うには、各弾性体について境界条件を指定する必要があります。動解析計算においては、弾性体および剛体はジョイントで結合され、マルチボディシステムを形成します。
弾性体についてESLMを実行する際、これらのジョイントはこの静的サブケースベースの構造最適化に含まれません。すなわち、各弾性体は、6つの剛体モードを有します。各弾性体の6つの剛体モードは、構造解析用に削除される必要があります。各弾性体の6つの自由度(DOF)は、6つの剛体モードを削除するために固定されなければなりません。6つ以上の自由度が1つの弾性体内で固定されると、追加で固定された自由度は弾性体に対しての制約となり、その結果、最適なソリューションが得られず、さらに、必要なESLMの外部ループが増える場合があります。
ESLが計算される方法のため、各弾性体は、各外部ループの0番目の内部反復で釣り合い状態にならなければなりません。これは、ESLによる静解析を実行するために、任意の6つの自由度(通常単一節点)を固定し、剛体モードを削除するためです。固定された節点における反力は、0番目の内部反復で0です。したがって、弾性体の6つの自由度が固定されているものの、追加の荷重は弾性体にかけられません。しかしながら、内部反復が進むにつれて、設計の変更は起こります。すなわち、釣り合い状態を維持している元のコンフィギュレーションも変化します。その結果、各外部ループ内の最初の内部反復から、釣り合い状態は成り立たなくなります。壊れてしまった釣り合い状態(不均衡状態)によって生じる望ましくない影響は、固定ポイントにおける反力が0ではなくなり、その固定ポイントに追加の荷重がかけられることです。形状 / 寸法の変化によるこの影響は、下記に説明するように、正しい節点を固定することで最小にすることができます。
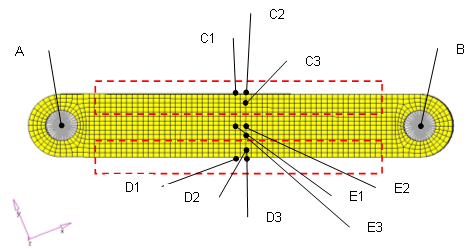
図 3. 2つの穴の中心位置にジョイントを有するソリッドモデル
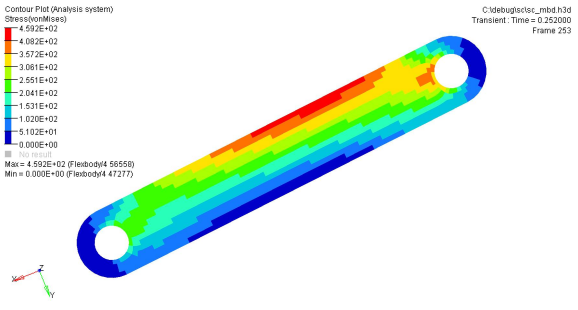
図 4. 2つのタイムステップにおけるモデルの応力コンター
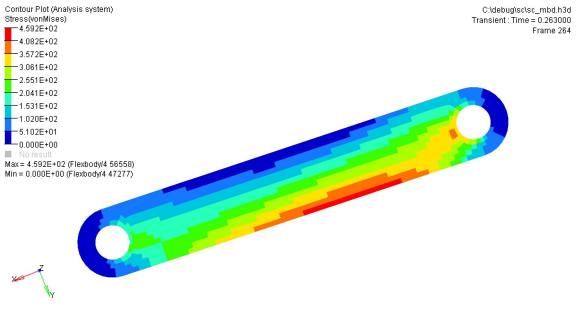
図 5.
節点AとBはジョイントの位置です。ここでの最良のオプションは、このモデル内の6つの剛体の動きを削除するために、いずれかの節点(AまたはB)の6つの自由度を固定することです。節点AまたはB以外の節点を固定するためには、節点E1の3つの自由度(123)、節点E2の2つの自由度(23)、および節点E3の1つの自由度(3)を固定します。これらの3つの節点は、比較的応力の小さい領域に位置しています。このモデルでは、節点C1、C2、C3、または節点D1、D2、D3が固定された場合、収束に長い時間がかかります。ここでもう一度述べると、各弾性体の6つの剛体モードを削除するために最良かつ最もシンプルな方法は、各弾性体内のジョイント位置のものを固定することです。

図 6. 回転片持ち梁

図 7. 左端が固定された場合の変形

図 8. 中央ポイントが固定された場合の変形
最適化プロセスにより生成される出力ファイル
出力ファイル群は、ESL最適化の収束後に生成されます。
- .eslout
- このテキストファイルには、最適化プロセスに関する簡潔かつ有益な情報が含まれます。まずこのファイルを開き、ESL最適化の間に何が起こったかを確認します。最適化プロセス全体を理解するには、このファイルで十分である場合がしばしばあります。下記の情報がこのファイルに保存されています:
- タイムステップと対応するサブケース
- タイムステップの回数
- 設計の結果
- 内部反復の数
- CPU時間
- _mbd_#.h3d
- このバイナリ出力ファイルには、#番目の外部ループのMBD解析結果が含まれます。変位、応答および変形がこのファイルに示されています。このファイルは、ESL最適化でのみ使用可能なフォーマットであるモーダルh3dフォーマット(PARAM,MBDH3D,MODAL)です。HyperViewはこのファイルを表示できます。
- _des_#.h3d
- このバイナリ出力ファイルには、#番目の外部ループの設計変更が含まれます。コンターボタンを選択することにより、設計の変更を確認することができます。HyperViewはこのファイルを表示できます。
- _mbd_#.abf
- このバイナリ出力ファイルには、#番目の外部ループのモードの刺激係数と剛体ダイナミクスに関する情報が含まれています。HyperGraphは、このファイルに保存されているデータを表示することができます。
上記の出力ファイルに加え、.desvar、.prop、.grid、.fsthick、および.ossが得られます(使用可能な場合)。
収束の促進
構造の最適化を行う際は、構造のクリティカルな応答を正しく捕捉することが重要です。一般的に、注目するクリティカルな応答が出現するタイムインターバル内で多くのタイムステップを定義することがよいとされます。
これによって、最適化エンジンは、クリティカルタイムインターバルにおけるより正確な応答を考慮でき、その結果、最適化エンジンが現在の外部ループ内で誤った方向に進む確率が低くなります。
MBSIM 4 TRANS END 1.0 NSTEPS 100$more time steps from 0.0 sec to 0.02 sec.
MBSIM 1 TRANS END 0.02 NSTEPS 200
+ VSTIFF
MBSIM 2 TRANS END 0.61 NSTEPS 200
+ VSTIFF
$more time steps from 0.61 sec to 0.63 sec.
MBSIM 3 TRANS END 0.63 NSTEPS 200
+ VSTIFF
MBSIM 4 TRANS END 1.0 NSTEPS 100
$
MBSEQ 10 1 2 3 4
図 9. 応答の時刻歴
上記のMBSIMカードにおいては、0秒から0.02秒までと0.61秒から0.63秒までのタイムインターバルのタイムステップが増やされています。一般的に、最適化エンジンがより多くの情報を得るほど、より良いソリューションが提供されます。注目するクリティカルな応答が出現するタイムインターバル内の応答を十分正確に捕捉するには、数多くのタイムステップを定義することが役立ちます。これは、最適化プロセスの収束を促進させることになります。
パラメータ
ESLMにおいて実行される外部ループの最大数のコントロール
DOPTPRM, ESLMAXここで、ESLMAXは0以上の整数値です。ESLMAXが0である場合、最適化プロセスはアクティブになりません。ESLMAXのデフォルト値は30です。
DOPTPRM, ESLSOPTESLSOPTは、0または 1であることが可能です。ESLSOPTが0の場合、スクリーニングは非アクティブです。ESLSOPTが1の場合、スクリーニングはアクティブです。デフォルトの値は1です。DOPTPRM,ESLSOPT,0によって非アクティブとされていない限り、この機能は常にアクティブとなっています。
タイムステップのスクリーニング機能は、ステップ3における静的応答最適化の制約条件スクリーニングとは異なります。ただし、両スクリーニング機能のコンセプトは同じです。タイムステップのスクリーニングは、静的応答最適化フェーズに入る直前であるタイムステップ2で実行されます。タイムステップのスクリーニングを静的応答最適化フェーズに入る前に実行することにより、構造解析と後続の制約条件スクリーニングストラテジーに要する膨大なCPU時間を、静的応答最適化フェーズの0回目の反復計算において節減することが可能になります。
DOPTPRM, ESLSTOLESLSTOLは0.0から1.0までの実数値です。ESLSTOLの値が小さければ小さいほど、最適化プロセスに含まれるタイムステップの数は少なくなります。ESLSTOLが1.0である場合、マルチボディダイナミクス解析内の全てのタイムステップは最適化プロセスに含まれるようになります。明らかに、ESLSTOLの値が小さいほど、使用されるCPU時間の総量は小さくなります。ただし、あまりに小さい値をESLSTOLに使用すると、最適化プロセスが発散してしまう場合があるので、注意が必要です。 したがって、ESLSTOLによって保持されるタイムステップの数が10より小さい場合、10の最も主要なタイムステップは、最適化プロセスに含まれるようになります。ESLSTOLのデフォルト値は0.3です。
出力リクエスト
ESL最適化においては、ユーザーは、解析の出力をコントロールすることができません。変位、応力および変形を含むマルチボディダイナミクス解析からの全情報は既に、_mbd_#.h3dに用意されています。
最初のサブケースの上でOutput Request =オプションが指定されている場合を除き、全ての解析出力リクエストはESL最適化中、無効とされています。例えば、STRESS=ALLまたはDISPLACEMENT=SIDが最初のサブケースの上に指定されている場合です。
ESL最適化では、最適化出力はコントロールすることができません。詳細については、等価静的荷重法(ESLM)をご参照ください。
ESL最適化では、出力および出力フォーマット内のフォーマットもコントロールできません。FSTHICKとOSSを除き、出力およびフォーマットに関する全てのリクエストは、ESL最適化では無効となっています。
システムレベルのMBD応答最適化
OptiStructにインプリメントされているオリジナルのESLMは、応力や変形といった構造応答の制御を介したMBDシステム内の弾性体の最適化用です。
Minimize joint force of a joint
subject to stress < allowable value
deformation < allowable value
velocities of a node < allowable valueシステムレベルのMBD応答は、PRBODY、CMBUSH(M)、CMBEAM(M)、CMSPDP(M)のプロパティと、構造最適化における通常の設計変数(ボディの板厚やボディの形状など)によって制御できます。設計変数とPRBODY、CMBUSH(M)、 CMBEAM(M)、CMSPDP(M)のプロパティの間の関係を定義するために、DVMBRL1とDVMBRL2を使用できます。
多数の設計変数
システムレベルのMBD応答は、アダプティブ応答曲面によって近似されます。
システムレベルのMBD応答の基本的な解析の戦略は、HyperStudyにインプリメントされているものと同じです。一般的に、応答曲面ベースの最適化は、多数の設計変数を扱うことができません。この問題は、ボディ用の中間設計変数の導入によってOptiStructで解決されています。剛体および弾性体に定義されている設計変数はすべて、予め定義されたいくつかの中間設計変数に変換されます。アダプティブ応答曲面は、それらの中間設計変数をベースに構築されます。その結果、ボディに何百の設計変数が定義されていても、システムレベルのMBD応答用のアダプティブ応答曲面は、いくつかの中間設計変数のみで構築が可能となります。このようにして、OptiStructは、多数の設計変数を含んだシステムレベルのMBD応答を扱うことができます。
形状最適化としてボディの長さを変更
特定の速度値を許容値よりも小さくしようと試みる際には、ボディの長さを変更すると効率的です。ボディの長さを変更するために、形状最適化問題をセットアップすることができます。
設計変数は、剛体または弾性体のいずれでも可能です。DVGRIDで形状摂動ベクトルを定義する際、各摂動ベクトルは、設計変更により元のジョイントのコンフィギュレーションを崩さないことを確実にする必要があります。例えば、回転ジョイントは、2つの異なるボディに付加する、同一座標上にある2つの節点を有していなくてはなりません。形状摂動ベクトルを定義する際には、同一座標上にある2つの節点のうちの1つのみについて摂動ベクトルが位置を変えてしまい、その結果、一度の設計反復計算後、回転ジョイントの定義が有効ではなくなる点に注意が必要です。
制限事項
PRBODY、CMBUSH(M)、CMBEAM(M)、CMSPDP(M)に関連付けされた設計変数は、変形や応力などの構造応答を制御することができません。
それらは、MBDIS、MBVEL、MBACC、MBFRC、MBEXPRなどのシステムレベルのMBD応答のみ、制御が可能です。長さ、形状、板厚などに関連付けされた設計変数は、システムレベルのMBD応答を制御できます。したがって、構造応答とシステムレベルのMBD応答の間の相互作用が強い場合、この特徴は十分に考慮されません。
剛体は、構造設計変数(形状、プロッティング、板厚など)と、TYPE=PRBODYでDVMBRL1/DVMBRL2と関連付けられた設計変数とを同時に持つことができません。
現時点では、システムレベルの応答は、スカラー値でなくてはなりません。OptiStructは、DRESP1カードを使ってシステムレベルのMBD応答を定義する際、変位 / 速度 / 加速度 / ジョイント荷重の最大値、最小値、絶対値の最大値および絶対値の最小値をピックアップするオプションを提供しています。システムレベルの応答が目的関数であり、目的関数がピックアップされる時間が最適化プロセス中にジャンプする場合、収束に時間がかかったり、場合によっては収束しないことがあり得ます。
非線形応答最適化のための等価静的荷重法
等価静的荷重法(ESLM)は、非線形応答最適化をサポートするために拡張されています。
- 陽解法動解析(EXPDYN)
サポートされている解析の種類の詳細については、陽解法動解析(Radioss連携)をご参照ください。
この手法は、通常の静的応答最適化問題で使用可能な各種応答タイプ、すなわち変位、ひずみ、応答などをサポートするために用意されています。現時点では、DRESP1および式内(DEQATN)によりEXPDYNについてDRESP2を使って定義される応答がサポートされています。
トポロジー、フリー寸法およびトポグラフィー最適化といった概念レベルの設計テクニックや、寸法、形状およびフリー形状最適化のような詳細設計テクニックが、ESLMを使った非線形応答最適化についてサポートされています。現在、トポロジー最適化にはPSHELLおよびPSOLIDが、フリー寸法最適化にはPSHELLがサポートされています。
- ESLM最適化を用いたソリッドトポロジー最適化には、直接密度コントロールが使用されます。線形静的応答トポロジー最適化が完了した後、トポロジー設計変数として0から1までの値を擁するソリッド要素が、有限要素モデル内で更新されます。各ソリッド設計要素には、関連付けされたトポロジー設計変数に等しい値を有する充填パーセンテージが直接割り当てられます。これは、Radioss /INIBRI/FILLを用いて、トポロジー設計変数と共に充填パーセンテージをマッピングします。
- ESLM最適化を用いたトポロジー最適化の場合、ソフト要素(ペナルティを科せられる特定の密度未満の要素)がRadioss非線形ランから自動的に除かれ、ESLM線形静的最適化欄で再導入されます。
最適化プロセスにより生成される出力ファイル
- [model]_#.h3d: #番目の外部ループの解析結果
- [model].eslout: 外部ループ反復計算履歴のサマリー
ESLMパラメータ
最適化プロセスをコントロールするために、いくつかのパラメータが用意されています。
DOPTPRM, ESLMAXDOPTPRM, DESMAXDOPTPRM, NESLEXPD