.trimファイル
空力弾性解析結果を含むASCIIフォーマットの結果ファイル。
ファイル生成
このファイルは、デフォルトですべての空力弾性トリム解析実行で常に作成されます。
ファイル内容
このファイルでは、トリム変数の空力係数や監視情報など、さまざまな空力弾性トリム解析出力に関する詳細情報が提供されます。このファイル内の特定の結果(空力要素の力や圧力など)は、対応するAEROFおよびAPRESSURE入出力エントリが指定されている場合にのみ出力されます。
ファイルフォーマット
このファイルには、モデル内の各サブケースの空力弾性トリム解析の解析情報が含まれます。このようなすべてのサブケースのデータが同じファイルに順番に出力されます。サブケースごとに、複数のデータセクションが存在しています。以下に、これらのセクションを例と共に示します。

図 1.
- 無次元の安定操縦微係数:
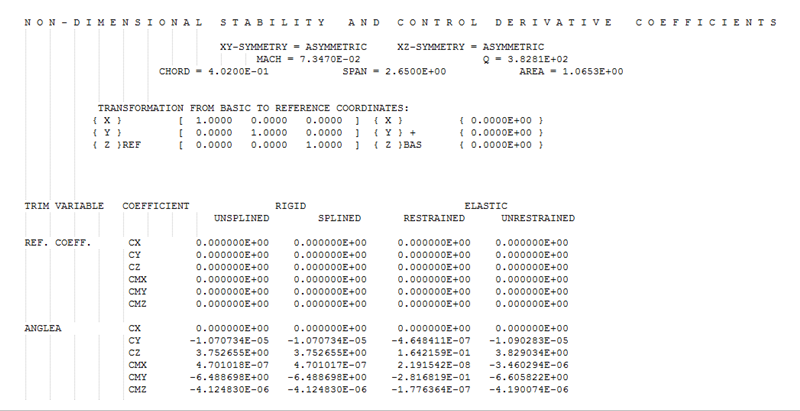
図 2.これらの係数は、剛性ケースと弾性ケースのサーフェスについて、航空機のトリム変数コンフィギュレーション情報を提供します。これらの係数を使用して、航空機のさまざまなコンフィギュレーションを比較したり、6つの自由度のシミュレーションを実行したりできます。
無次元係数は、AESTATエントリでリストされた各剛体運動、およびAESURFエントリでリストされた操縦翼面についての力の係数(CX、CY、CZ)およびモーメントの係数(CMX、CMY、CMZ)として出力されます。
次元力およびモーメント安定微係数は以下のとおりであるため、このセクションに出力される安定微係数は無次元です:- 力係数の場合: 動圧と機体の基準面積の積によって正規化されます。
- モーメント係数の場合: 動圧、基準面積、およびアーム長の積によって正規化されます。CMXとCMZのアーム長は基準翼幅(AEROSのREFB)によって正規化され、CMYのアーム長は基準翼弦(AEROSのREFC)によって正規化されます。
- RCSID座標系の原点上のサポート位置から空力基準ポイントに変換されます。RCSID座標系は、ボディ座標系または基準座標系とも呼ばれます(詳細については、ユーザーズガイド内の座標系をご参照ください)。基準翼弦距離と基準翼幅距離を考慮することによって正規化されます。
- RIGID
- RIGIDは、剛性解析向けに係数が計算されることを意味します。この場合、空力荷重については構造の弾性変形が無視されます。
- SPLINED
- 係数は、スプラインコンフィギュレーションに基づいて構造メッシュ上で計算されます。スプラインは、構造メッシュと空力メッシュの間の結合です。
- UNSPLINED
- 係数は、非スプラインコンフィギュレーションの空力メッシュに基づいて計算されます。スプラインコンフィギュレーションと非スプラインコンフィギュレーションの間で係数が異なる場合は、スプライン補間の質が低い可能性があります。
- ELASTIC
- ELASTICは、構造の弾性変形が空力荷重変化の一要因と見なされるトリム解析向けに係数が計算されることを意味します。
- RESTRAINED
- トリム解析では、SUPORT自由度はSPCと見なされます。拘束されたコンフィギュレーション内の係数は、これらのSUPORT自由度の変位をゼロにした後に計算されます。
- UNRESTRAINED
- 拘束されていないコンフィギュレーション内の係数は、SUPORT自由度をゼロにすることなく計算されます。代わりに、追加の方程式を使用して、これらの解放された自由度に関連する特異点が排除されます。
- 無次元のヒンジモーメント微係数:
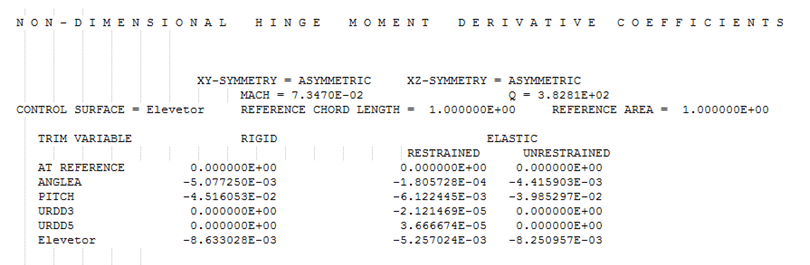
図 3. 剛性および弾性ケースについて、操縦翼面のトリム変数係数情報を提供上記のセクションには、操縦翼面のヒンジモーメント微係数が含まれています。操縦翼面はAESURFエントリで定義され、ここで出力される無次元の係数は次のとおりです:- 基準面積、動圧、およびアーム長の積によって正規化されます(使用されるアーム長の詳細については、上記のセクションをご参照ください)。
すべての操縦翼面には1つのヒンジが含まれ、このヒンジを中心にした回転が、航空機のコンフィギュレーションの制御に使用されます。例として、上の表に示された昇降舵は、ヒンジ軸を中心にした1.0ラジアンの回転ごとに-8.63302E-03というモーメントを示し、ANGLEA=PITCH=URDD3=URDD5=0.0であるとします。
- 中間マトリックス: 以下の係数は、構造の剛体モードに依存しています。
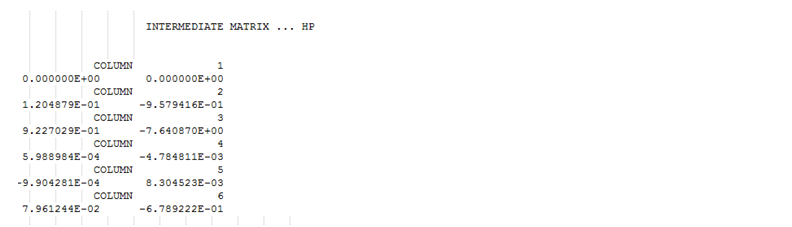
図 4. 内部慣性リリーフ情報 - 空力弾性トリム変数データ、状態、および対応する境界。
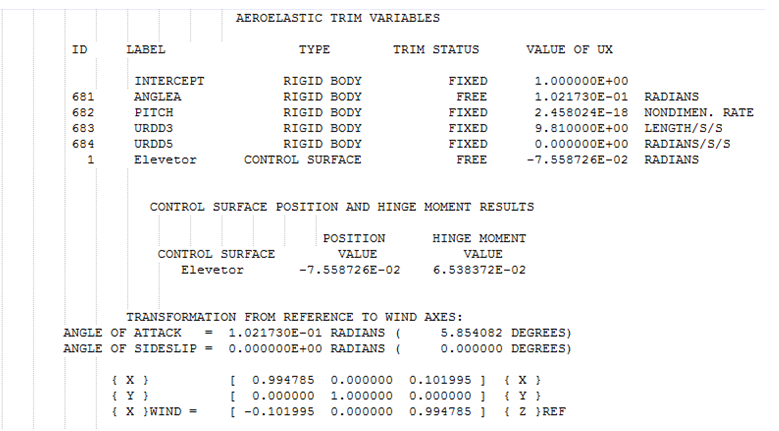
図 5. 操縦翼面情報を含む上の表の最初の部分では、トリム変数データ、状態、およびタイプが示されています。トリム変数データには操縦翼面も含まれています。表の2番目の部分には、基準軸から風軸への変換マトリックスに関する情報が含まれています。例えば、新しいアタック角によって風速角の変化が生じる場合は、風座標系は基準座標系とは異なる可能性があります。(詳細についてはユーザーズガイド内の座標系をご参照ください。)
- 構造メッシュ:
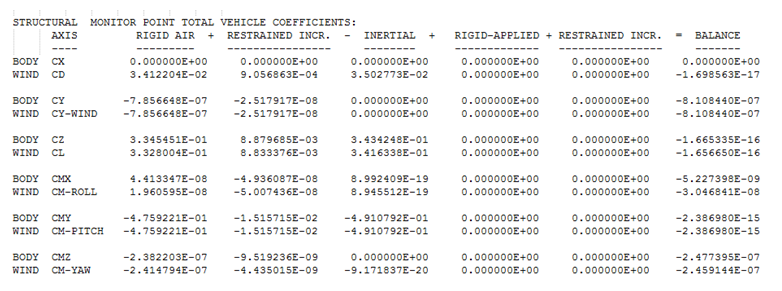
図 6. 監視ポイントの全機体係数図 6に表示される監視ポイント情報は、MONPNTiエントリによって制御されません。この表は、それぞれの方向と座標系(BODY/WIND)における力とモーメントの概要を示しています。- BODY
- ボディ基準座標系を示します。
- WIND
- 風座標系を示します(風座標系の定義については、上記のセクションをご参照ください)。
- CX、CY、CZ、CMX、CMY、およびCMZ
- BODY座標系の力とモーメントの係数。
- CD
- 新しい風X軸の抗力。CYは、ボディRCSID座標系のCYと同じです。
- CL
- 流体空気速度ベクトルに対して垂直です(CDに対して垂直)。
- RIGID AIR – 係数
- 空力のみに起因する力の係数を示します。機体のトリムコンフィギュレーションに起因して構造にかかる力(適用荷重や慣性荷重は含まれません)。
- RESTRAINED INCR (表の2列目) – 係数
- 初期の空力荷重(RIGID AIR)と慣性荷重(INERTIAL)によって生じる弾性変形に起因する追加の増分空力の係数を示します。これには、追加の増分空力荷重に対する適用荷重(RIGID APPLIED)の寄与は含まれません。
- INERTIAL – 係数
- 構造に対する慣性力の係数を示します。慣性力は、特定のトリムコンフィギュレーションの質量に起因して生じる任意の力です。
- RIGID APPLIED – 係数
- ユーザー入力 / 外部適用荷重の係数を示します。これらは、サブケース定義で力やモーメントなどとして指定される任意の荷重です。
- RESTRAINED INCR (表の6列目)
- 係数(これはRIGID APPLIEDの後の反復列です)
- 空力メッシュ:
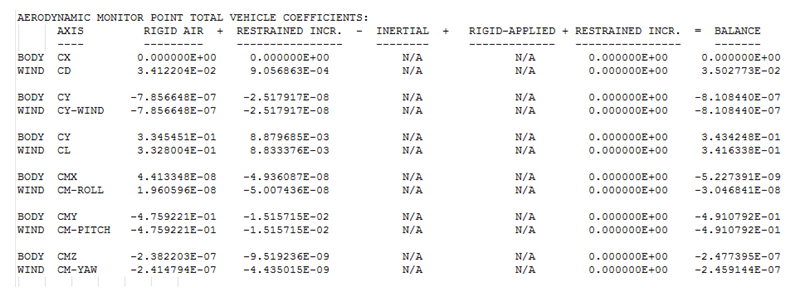
図 7. 監視ポイントの全機体係数図 6に表示される監視ポイント情報は、MONPNTiエントリによって制御されません。この表は、それぞれの方向と座標系(BODY/WIND)における力とモーメントの概要を示しています。
空力メッシュについては、下記のアイテムは、前セクションの構造メッシュの表の場合と同じように解釈されます。- BODY
- ボディ基準座標系を示します。
- WIND
- 風座標系を示します(風座標系の定義については、上記のセクションをご参照ください)。
- CX、CY、CZ、CMX、CMY、およびCMZ
- BODY座標系内の力とモーメントの係数。
- CD
- 新しい風X軸内の抗力。
- CY
- ボディ座標系のCYと同じです。
- CL
- 流体空気速度ベクトルに対して垂直です(CDに対して垂直)。
- RIGID AIR – 係数
- 空力のみに起因する力の係数を示します。機体のトリムコンフィギュレーションに起因する力(適用荷重や慣性荷重は含まれません)。
- RESTRAINED INCR (表の2列目) – 係数
- 初期の空力荷重(RIGID AIR)と慣性荷重(INERTIAL)によって生じる弾性変形に起因する追加の増分空力の係数を示します。これには、追加の増分空力荷重に対する適用荷重(RIGID APPLIED)の寄与は含まれません。
- INERTIALとRIGID APPLIED
- これらは空力メッシュ係数として定義されていないため得られません。
- RESTRAINED INCR (表の6列目) – 係数
- (これはRIGID APPLIEDの後の反復列です)

図 8. 空力の出力(AEROFエントリによって制御)注目すべき列は次のとおりです。- PANEL ID
- 空力が出力されるパネルのIDを示します。
- T3
- これはパネルに対して垂直な方向です。X軸は、AEROS(ACSID)で定義されているものと同じです。ポイント1と4(CAERO1エントリ)が配置された後、この垂直方向はZ方向と見なされます。XとZから、Y軸を計算できます。
- R2
- 各パネルのピッチ角。
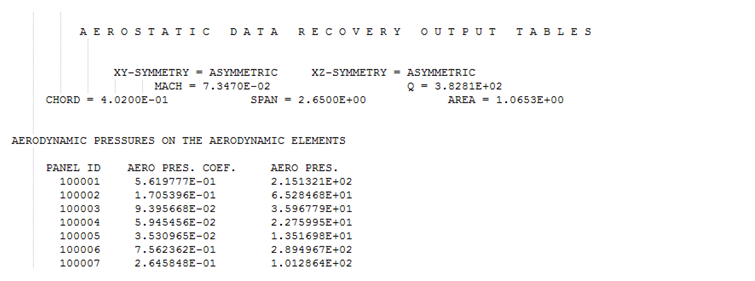
図 9. 空力圧力の出力(APRESSUREエントリによって制御)図 9 は、AEROFエントリによって制御される空力モーメントの出力をリストしています。注目すべき列は次のとおりです。- PANEL ID
- 空力モーメントが出力されるパネルのIDを示します。
- AERO PRES.COEF.
- 空力圧力の係数。
- AERO PRES.
- 空力圧力。
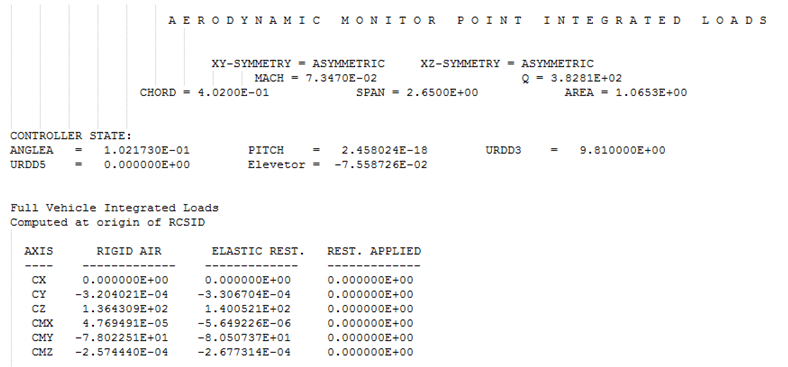
図 10. 監視ポイントの全統合荷重この表は、RCSID座標系の原点における機体全体の統合荷重を示しています。以下の説明で示されている係数は、上記の構造メッシュ - 監視ポイント係数の表に基づきます。
下記用語の詳細については、上記の構造メッシュ - 監視ポイント係数の表で対応する説明をご参照ください。- AXIS
- 力またはモーメントの自由度を示します。
- RIGID AIR - 荷重
- これは、RIGID AIR係数×動圧×面積で算出されます。
- ELASTIC REST - 荷重
- (RIGID AIR係数 + RESTRAINED INCR, Column 2係数)×動圧×面積で算出されます。
- INERTIAL - 荷重
- INERTIAL係数×動圧×面積で算出されます。
- RIGID APPLIED - 荷重
- これは実際のユーザー入力荷重です。
- REST.APPLIED
- (RIGID APPLIED係数 + RESTRAINED INCR, Column 6係数)×動圧×面積で算出されます。
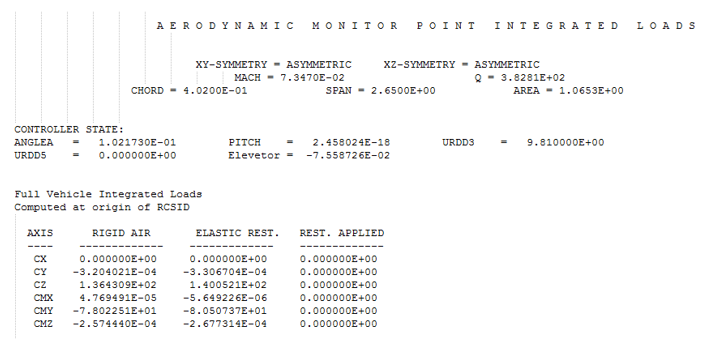
図 11. 監視ポイントの全統合荷重この表は、RCSID座標系の原点における機体全体の統合荷重を示しています。以下の説明で示されている係数は、上記の空力メッシュ - 監視ポイント係数の表に基づきます。
下記用語の詳細については、上記の構造メッシュ - 監視ポイント係数の表で対応する説明をご参照ください。- AXIS
- 力またはモーメントの自由度を示します。
- RIGID AIR - 荷重
- これは、RIGID AIR係数×動圧×面積で算出されます。
- ELASTIC REST - 荷重
- (RIGID AIR係数 + RESTRAINED INCR, Column 2係数)×動圧×面積で算出されます。
- REST.APPLIED
- (RIGID APPLIED係数 + RESTRAINED INCR, Column 6係数)×動圧×面積で算出されます。