MV-9003: LuGre Friction Tutorial
In this tutorial, you will learn how to implement and use a new MotionSolve object.
- Create a friction force on a translational joint using the LuGre friction model, and using Object Oriented Design with classes.
A class is a blueprint, or template, that allows you to create a higher level entity and treat it just like any other MotionSolve object.
In this example, you will combine a series of MotionSolve entities into a class called LuGre to define a new modeling element that exhibits new behavior. This process is called aggregation and MotionSolve provides a special composite class to represent such objects.
Composite is a special class that allows you to aggregate entities, such as parts, markers, forces, differential equations, and other MotionSolve primitives. A composite class object behaves just like any other solver object except it is a collection of entities conveniently packaged together. They behave as atomic entities and can be instantiated multiple times.
The advantage of using the composite class is that the LuGre object inherits behaviors from the base class. In particular, you will be able to modify the LuGre object at run-time, just like you would issue a modify command on any other MotionSolve primitive object, such as a part or a marker. The example below illustrates how you can create your own composite class. First, you'll examine the LuGre friction model.
LuGre Friction Model
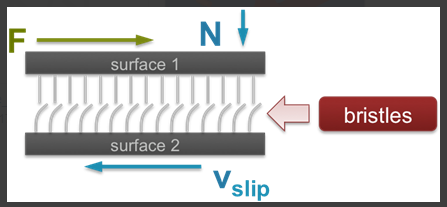
Figure 1.
- = Stiction to dynamic friction transition velocity
- = Coefficient of static friction
- = Coefficient of dynamic friction
- = Bristle stiffness
- = Bristle damping
- = Viscous coefficient
- Velocity in joint v =
- Stribeck factor
- The normal force
- Coulomb friction
- Static Friction
- ODE defining bristle deflection
- The friction force
- DIFF defining the bristle deflection
- MARKER defining the point of action of the friction force
- FORCE defining the friction element
- REQUEST capturing the friction force on the block
Load the Msolve Module
-
Now that the class has been defined, you need to to fill the implementation
details. The LuGre friction uses a single component force between two bodies,
and a first-order differential equation that models the average deflection of
the bristles as a function of slip velocity, coefficients of friction, and
normal force. First you'll work on the Single Component Force. The goal of the
Sforce function (normally called SfoSub) is to compute and
return the scalar value of the friction force. The three component depicted here
are computed separately in the force function.
def lugre_diff(self, id, time, par, npar, dflag, iflag): "Diff user function" i = self.joint.i j = self.joint.j vs = self.vs mus = self.mus mud = self.mud k0 = self.k0 z = DIF(self) v = VZ(i,j,j,j) N = math.sqrt (FX(i,j,j)**2 + FY(i,j,j)**2) fs = mus*N fc = mud*N p = -(v/vs)**2 g = (fc + (fs - fc) * math.exp(p))/k0 def smooth_fabs(x): returnmath.fabs(x) # temp solution if iflag or math.fabs(g) <1e-8: return v else: return v - smooth_fabs(v) * z / g def lugre_force (self,id, time, par, npar, dflag, iflag): "Friction Force user function" i = self.joint.i j = self.joint.j diff = self.diff k0 = self.k0 k1 = self.k1 k2 = self.k2 v = VZ(i,j,j,j) z = DIF(diff) zdot = DIF1(diff) F = k0*z + k1*zdot + k2*v #print "Time=", time, " V=", v, " Z=", z, " ZDOT=", zdot, " F=", F #print "k0*z=", k0*z, " k1*zdot=", k1*zdot, " k2*v=", k2*v return -FThe composite class LuGre is inherited from the built-in composite class. You have to write two special methods, createChildren and setChildDataValue, to define the behavior of this class. You can also optionally write a validate method, validateSelf.
Each composite class must have two methods.- The first method is called createChildren. It is used to create all the MotionSolve entities that are needed by the composite class. When the composite class object is created, the createChildren method is invoked. This happens only once, at the creation of the composite object. In createChildren, you will instantiate various MotionSolve objects and define their immutable properties.
- The updateChildren method is used to define all the mutable properties of the class and updates the class object with the new values. This facilitates modifying those values at runtime, when the solver is running and it can be done easily just like any other primitive MotionSolve objects. This is explained in more detail later in the tutorial.
An optional method called validateSelf can be defined. This method checks the input to ensure that the data provided to the LuGre class interface is physically meaningful. For example, by verifying that the static friction coefficient is larger than the dynamic friction coefficient.
After the methods described above, there are two additional functions. These are the Sforce and Diff user written subroutines. Note that these functions are created directly within the class definition. The advantage of doing this is to make the class properties available to the implementation of the subroutines.
This obviates the need to pass parameters to the user subroutines.
The Sforce subroutine computes the three components of the friction Sforce, as described in the image below.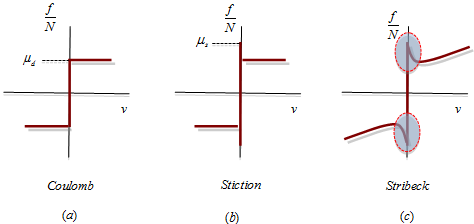
Figure 2.Note that the function's first argument is self because Sforce and Diff user written subroutines are Python callable class methods. Also, note that the signature of the Sforce function is in the familiar form (id, par, npar, and so on) but you are not actually unpacking the parameters, as there is no need to pass anything to the subroutine.
You are in fact accessing the properties of the LuGre instance by using the dot operator on the instance itself.
Similarly, you can define the differential equation. This also accesses the LuGre properties directly.
Create a Model
Now that you have completely defined the LuGre class and implemented the two methods (Sforce and Diff), you have to create a suitable model for testing.
You can use a simple friction element defined between two bodies on a sliding block. The sliding block is constrained by a translational joint and a forcing function acts upon it.
You can study the effect of changing the Static Friction Coefficient μs on the computed friction force by modifying it between simulations.
The model is created inside a function, called _slidingblock, in the code cell below. This is done purely for convenience.
-
Then, extract some of the data to plot. At this point, you can create a plot
object and display three separate curves.
- The friction force.
- The velocity of the block.
- The block displacement.
def plot(model):# get the channels from the model... disp = run.getObject (model.r1) velo = run.getObject (model.r3) force = run.getObject (model.r2) plt.subplot(3, 1, 1) plt.plot(force.times, force.getComponent (3)) plt.title('Friction force') plt.ylabel('force [N]') plt.subplot(3, 1, 2) plt.plot(velo.times, velo.getComponent (3),'r') plt.title('Block Velocity') plt.ylabel('velocity [m/s]') plt.subplot(3, 1, 3) plt.plot(disp.times, disp.getComponent (3),'g') plt.title('Block Displacement') plt.xlabel('time (s)') plt.ylabel('travel [m]') plt.grid(True) plt.tight_layout() # Show the plot plt.show()In [7]: plot(model)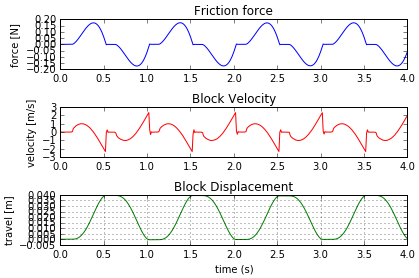
Figure 3. -
To increase the friction static coefficient, set the LuGre to a different value and continue the simulation
for an additional four seconds.
In [8]: model.lugre.mus= 0.4 run = model.simulate (type="DYNAMICS", returnResults=True, duration=4, dtout=.01) # replot the quantities and observe the changes to the Friction Force plot(model)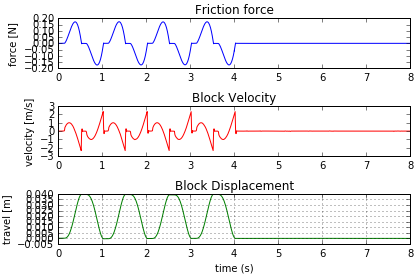
Figure 4.With the increased , you can see that the forcing function cannot overcome the bristle resistance and the block is not able to move.