State Dependent Variables
You can assign inputs to motors and actuators that are dependent on the state of motors, actuators, systems, and measures. Example input types include Torque vs. Speed, Force vs. Angle, and Force vs. Distance.
-
Make the motor or actuator dependent on a variable object:
-
In the microdialog, click
 Time, and then select the
Time, and then select the  Independent Variable
option.
Independent Variable
option.
-
Click
 Select an Independent
Variable.
Select an Independent
Variable.
- In the modeling window, select a measure, system, actuator, or motor to make it the independent variable.
-
In the microdialog, click
-
In the Profile Editor, specify the variable range or cycle over which input
function will be applied.
-
In the microdialog click
 Profile Editor.
Profile Editor.
- Specify the variable range or cycle over which the input function will be applied:
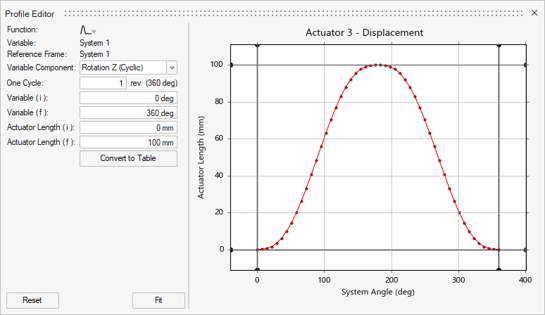
Option Description Function Select a profile function. Supported function include: - Step
- Step-Dwell-Step
- Single Wave
- Impulse
- Table
Variable The independent variable object (system, measure, motor, or actuator). Reference Frame The reference frame used by the variable component. Variable Component The independent variable component output that the state dependent object (system, measure, motor, or actuator) will monitor. Use the dropdown menu to access to the library of functions. 
One Cycle For Cyclic rotations, the V(i) and V(f) values can be specified to fall within this cycle range. For example, a 4-stroke piston engine will experience combustion force every 2 revolutions (or 7200) of the crankshaft. Variable (i) Enter the initial value of the independent variable object. Variable (f) Enter the final value of the independent variable object. [Variable Object] Force (i) Enter the initial value of the state dependent object (system, measure, motor, or actuator). [Variable Object] Force (f) Enter the final value of the state dependent object (system, measure, motor, or actuator). -
In the microdialog click