コントローラ
フィードバックコントロールループによって、目標値の試行と達成の手段としてコントローラが設けられています。
モーターおよびアクチュエータは、デフォルトではコントローラを使用しますが、マイクロダイアログ  にはこのコントローラを無効にできるオプションがあります。
にはこのコントローラを無効にできるオプションがあります。

図 1. モーターのコントローラオプション

図 2. アクチュエータのコントローラオプション
にはこのコントローラを無効にできるオプションがあります。図 1. モーターのコントローラオプション
図 2. アクチュエータのコントローラオプション
コントローラのタイプ
プロパティエディタでは2つのタイプのコントローラが利用できます。
- PID
- ソフト制約(角度モーターおよび変位アクチュエータにのみ使用可能)
注: 一般にはコントローラのご使用をお勧めしますが、ご使用のコントローラがご希望に沿わない場合は、無効にしてみてください。選択したプロファイルファンクションは、フィードバックループを組み込むことなく、直接使用できます。
PIDコントローラ
PIDは、従来の比例・積分・微分(PID)コントロールスキームです。コントローラが予測どおりに応答しない場合は、プロパティエディタでゲインを調整できます。
- 比例ゲイン
- 積分ゲイン
- 微分ゲイン
ソフト制約コントローラ
ソフト制約は、従来のコントローラではありませんが、多少の制約違反は許容される数学的な制約に近いものです。(そのためにソフト制約なのであり、対照的にハード制約では制約違反はまったく許容されません。)
ソフト制約の動作は、プロパティエディタで係数を調整して変更できます。
- 比例係数
- 微分係数
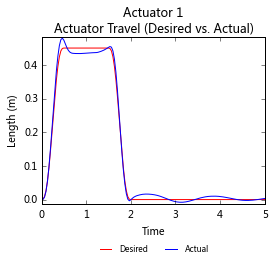
例
このプロットでは、目標の矩形プロファイルファンクションをオーバーシュートするソフト制約コントローラの例を示します。