SS-T:2020 点焊
在 SimSolid 中创建点焊。
- 目的
- SimSolid 执行无网格结构分析,适用于全功能零件和装配,容忍几何缺陷,并在几秒钟至几分钟内运行。在本教程中,您将执行以下操作:
- 使用 CSV 文件或直线上的载荷点来创建点焊。
- 创建独立载荷点。
- 显示、编辑、隐藏和删除载荷点。
- 用点焊求解分析,并查看点焊力。
- 模型描述
- 本教程需要以下模型文件:
- 3_plates.x_b
- Spots.csv
- Spots.ssp
导入几何模型
-
点击
 (从文件导入)图标。
(从文件导入)图标。
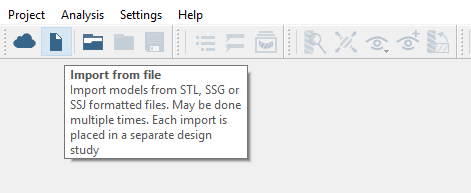
图 1. -
点击打开。
装配将加载到模型视窗中。将弹出信息窗口,警告检测到重叠零件。还将打开查看重叠零件对话框。自动连接对话框将打开。钢被施加于零件。
 图 2.
图 2.
从 CSV 导入焊缝
-
在 连接工作台 工具栏,点击
 (创建点焊或激光焊)图标。
(创建点焊或激光焊)图标。
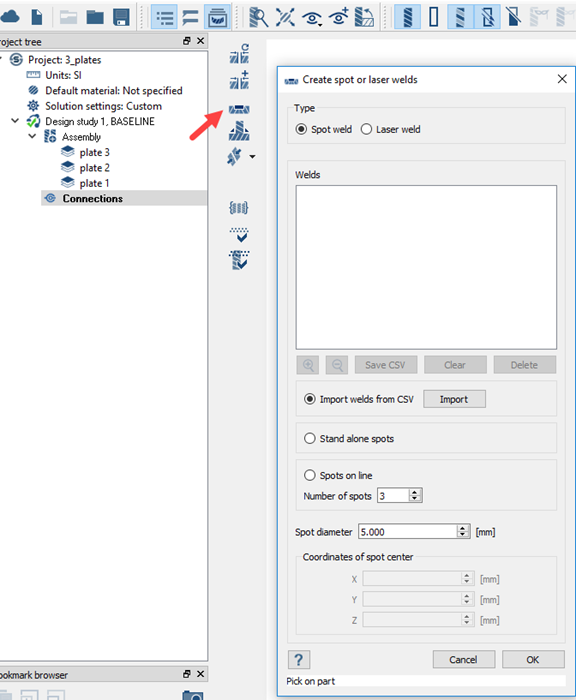
图 3. -
点击打开。
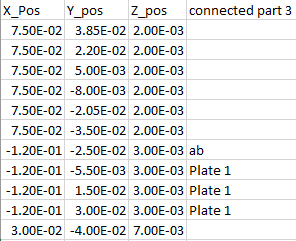
导入的焊缝会在对话框中列出。如果焊点的 XYZ 值超出容差-载荷点直径,则焊缝会失败。失败的焊缝将列为红色。
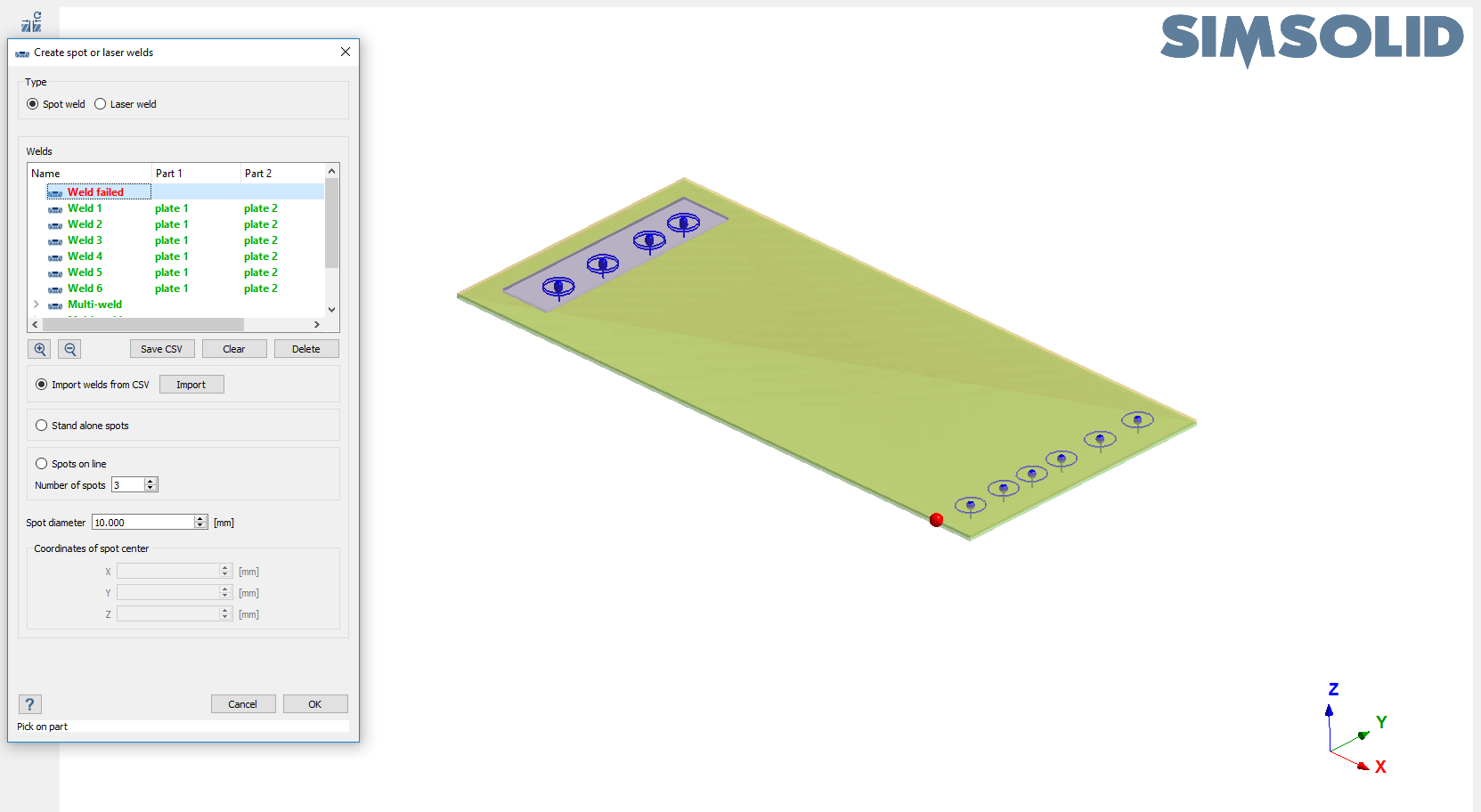
图 5. - 可选:
使用
 和
和  (放大/缩小)按钮,查看焊缝。
(放大/缩小)按钮,查看焊缝。
- 点击确定。
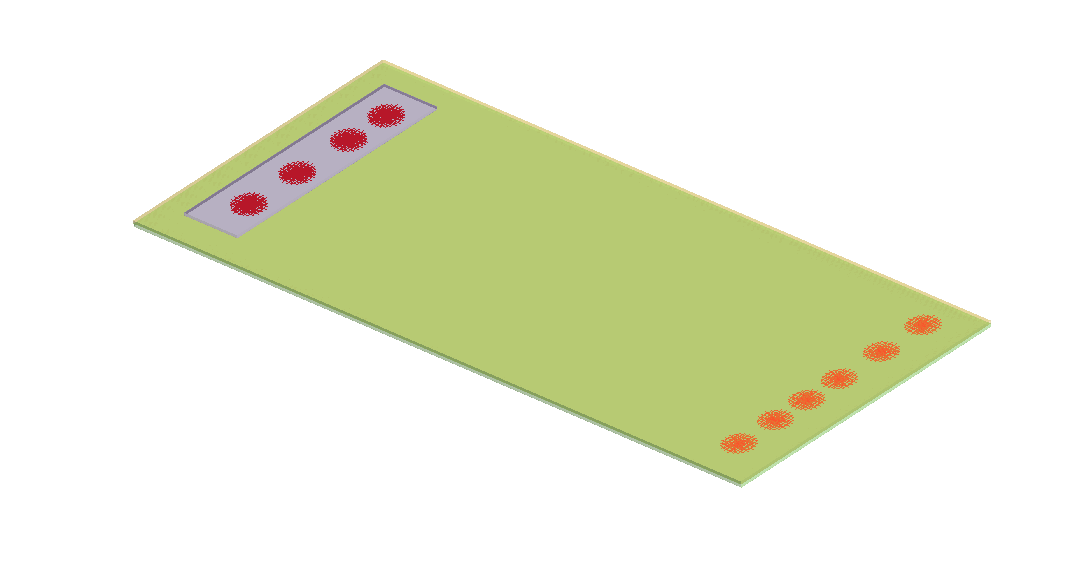
图 6.
在直线上创建点焊
-
在连接工作台工具栏上,点击 (创建点焊或激光焊)图标。
图 7. -
使用上/下箭头定义载荷点数量。
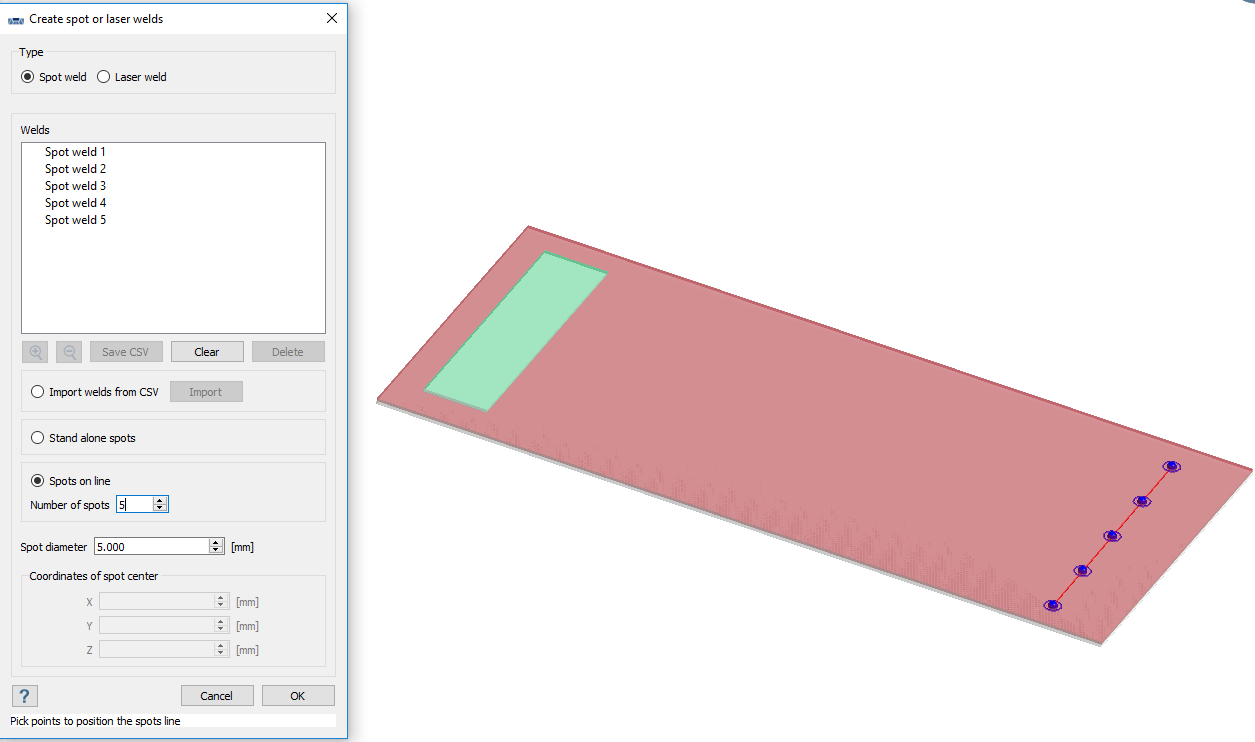
图 8.
创建独立点焊
-
在 连接工作台 工具栏上,点击 (创建点焊或激光焊)图标。
图 9. -
点击 图 10 中显示的零件即可在所需位置创建载荷点。
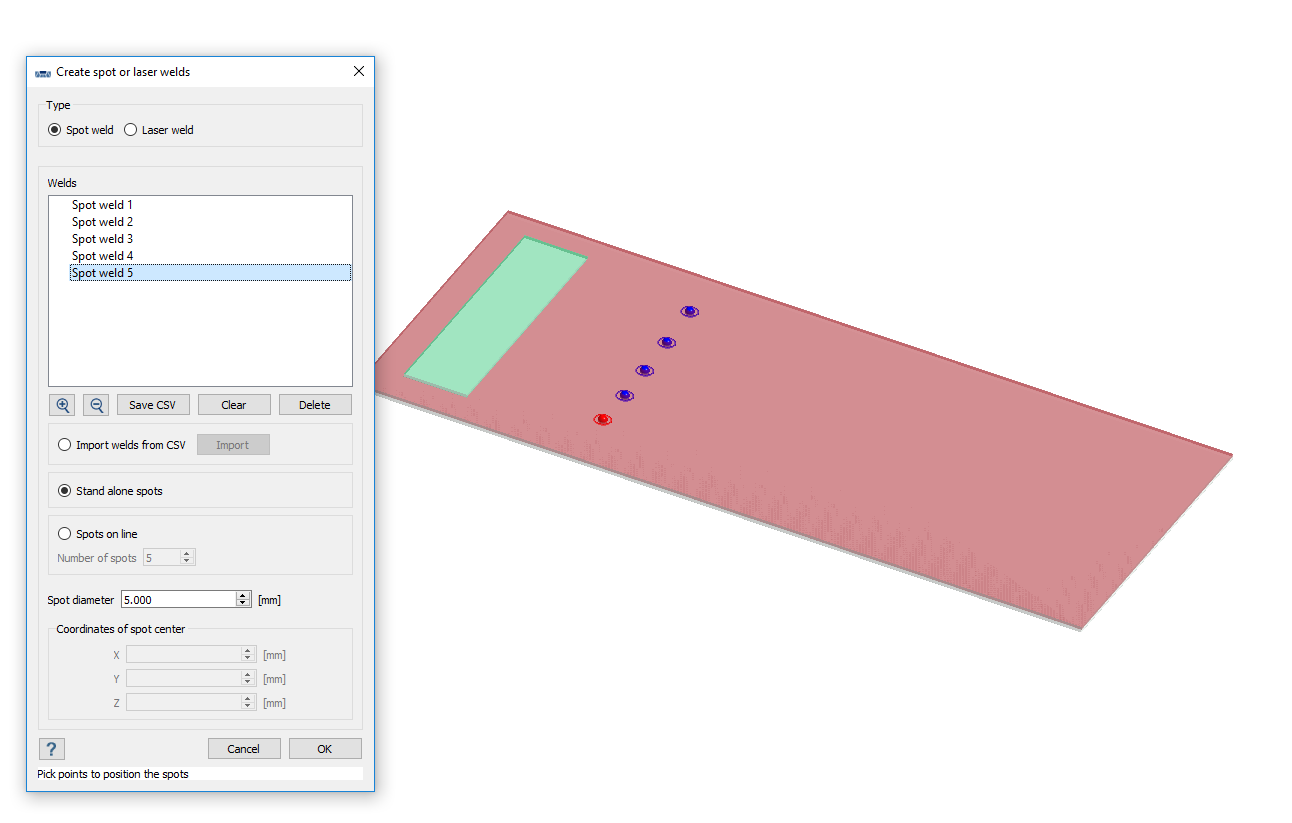
图 10.
编辑点焊
-
在项目树中,右击点焊 1,并从右键菜单中选择编辑连接。
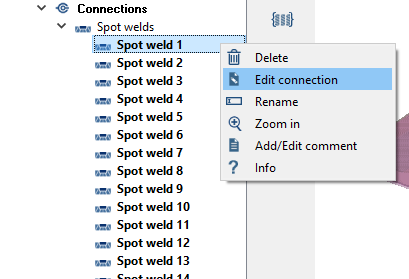
图 11. -
将直径改为 5.000
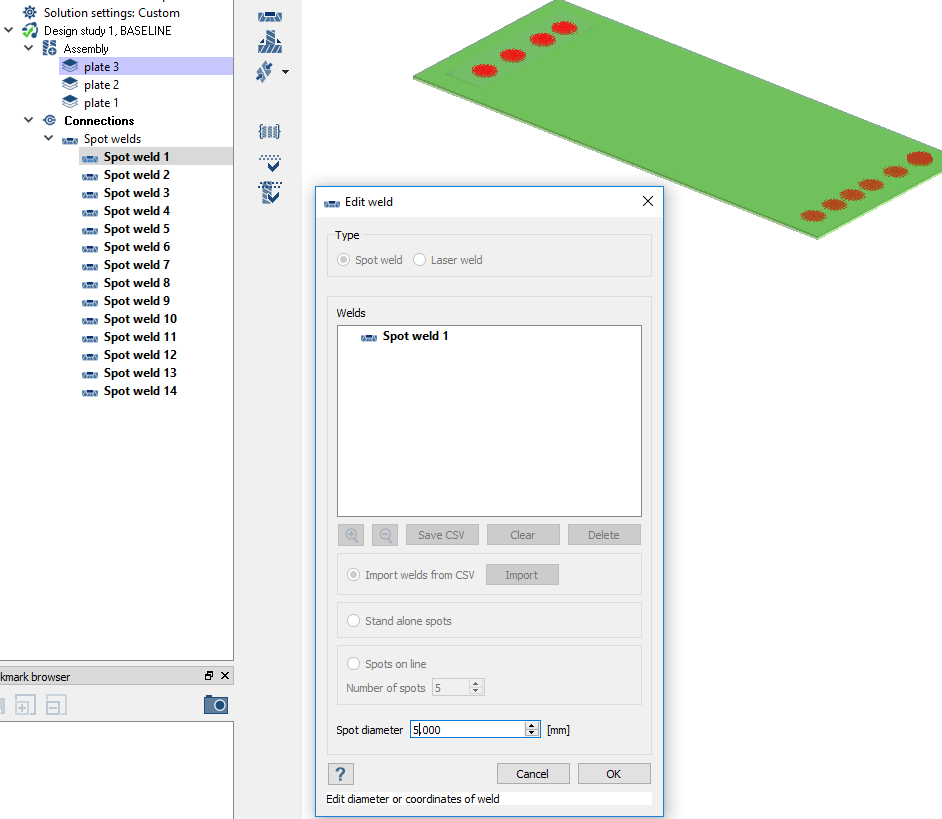 图 12.
图 12.
打开项目
-
点击
 (打开项目)图标。
(打开项目)图标。
图 13.
查看点焊力
-
点击
 (求解)。
(求解)。
-
查看创建的模型和点焊。
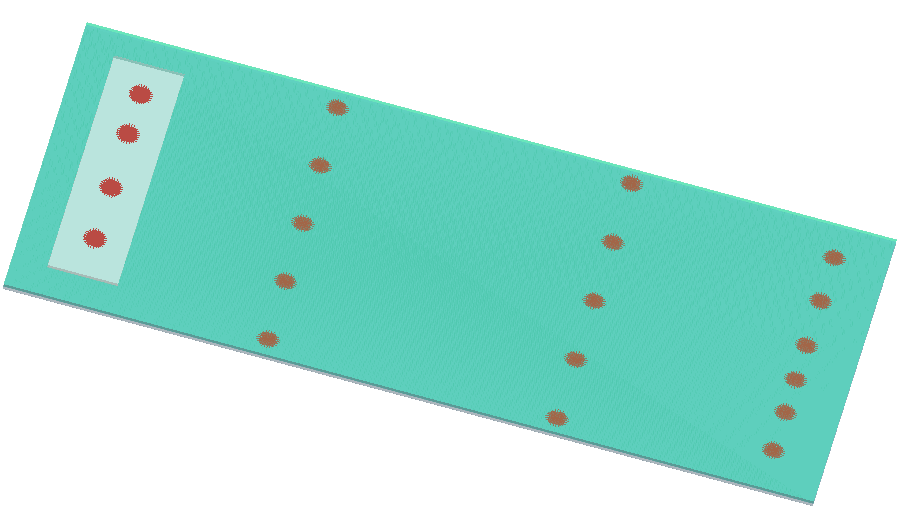
图 14. -
查看点焊力。
-
在分析工作台工具栏上,选择
 (焊接力) > 点焊力。
(焊接力) > 点焊力。
图 15.点焊反作用力将在对话框中列出。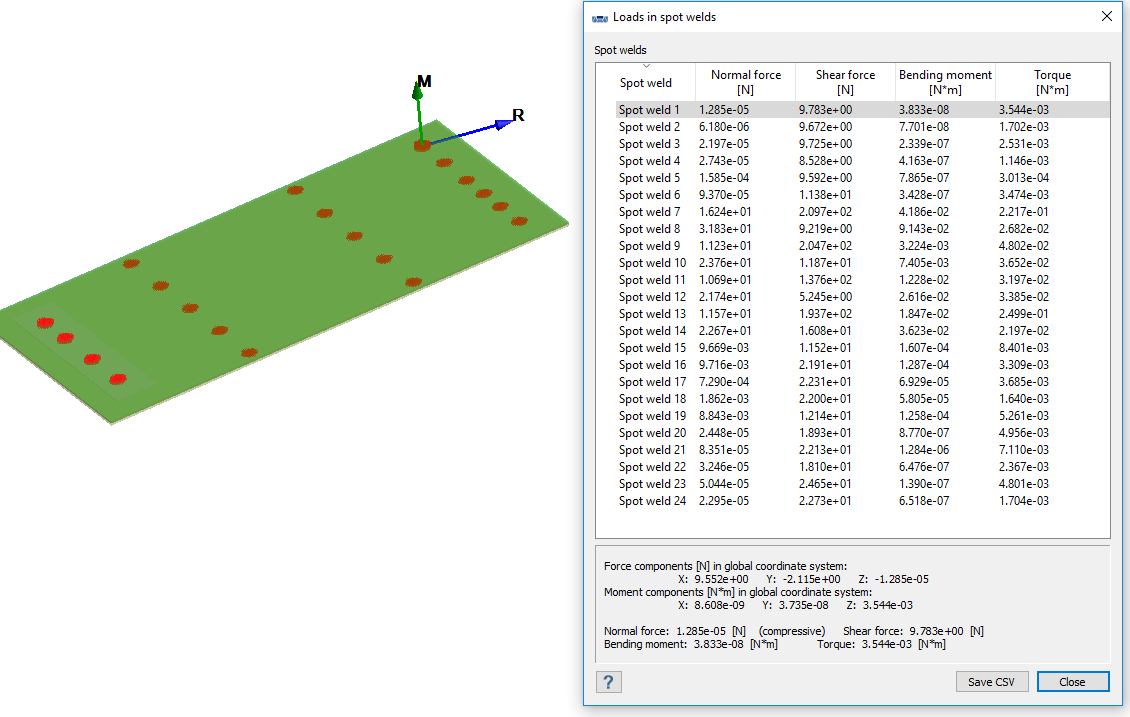
图 16.
-
在分析工作台工具栏上,选择