Clutch
Clutch based on Coulomb friction
![]()
Library
Mechanics/Rotational/Components
Description
This component models a clutch, i.e., a component with two flanges where friction is present between the two flanges and these flanges are pressed together via a normal force. The normal force fn has to be provided as input signal f_normalized in a normalized form (0 ≤ f_normalized ≤ 1), fn = fn_max*f_normalized, where fn_max has to be provided as parameter. Friction in the clutch is modelled in the following way:
When the relative angular velocity is not zero, the friction torque is a function of the velocity dependent friction coefficient mue(w_rel) , of the normal force "fn", and of a geometry constant "cgeo" which takes into account the geometry of the device and the assumptions on the friction distributions:
frictional_torque = cgeo * mue(w_rel) * fn
Typical values of coefficients of friction:
dry operation : mue = 0.2 .. 0.4
operating in oil: mue = 0.05 .. 0.1
When plates are pressed together, where ri is the inner radius, ro is the outer radius and N is the number of friction interfaces, the geometry constant is calculated in the following way under the assumption of a uniform rate of wear at the interfaces:
cgeo = N*(r0 + ri)/2
The positive part of the friction characteristic mue(w_rel), w_rel >= 0, is defined via table mue_pos (first column = w_rel, second column = mue). Currently, only linear interpolation in the table is supported.
When the relative angular velocity becomes zero, the elements connected by the friction element become stuck, i.e., the relative angle remains constant. In this phase the friction torque is calculated from a torque balance due to the requirement, that the relative acceleration shall be zero. The elements begin to slide when the friction torque exceeds a threshold value, called the maximum static friction torque, computed via:
frictional_torque = peak * cgeo * mue(w_rel=0) * fn (peak >= 1)
This procedure is implemented in a "clean" way by state events and leads to continuous/discrete systems of equations if friction elements are dynamically coupled. The method is described in (see also a short sketch in UsersGuide.ModelingOfFriction):
- Otter M., Elmqvist H., and Mattsson S.E. (1999):
- Hybrid Modeling in Modelica based on the Synchronous Data Flow Principle. CACSD'99, Aug. 22.-26, Hawaii.
More precise friction models take into account the elasticity of the material when the two elements are "stuck", as well as other effects, like hysteresis. This has the advantage that the friction element can be completely described by a differential equation without events. The drawback is that the system becomes stiff (about 10-20 times slower simulation) and that more material constants have to be supplied which requires more sophisticated identification. For more details, see the following references, especially (Armstrong and Canudas de Wit 1996):
- Armstrong B. (1991):
- Control of Machines with Friction. Kluwer Academic
Press, Boston MA.
- Armstrong B., and Canudas de Wit C. (1996):
- Friction Modeling and Compensation.
The Control Handbook, edited by W.S.Levine, CRC Press,
pp. 1369-1382.
- Canudas de Wit C., Olsson H., Åström K.J., and Lischinsky P. (1995):
- A new model for control of systems with friction. IEEE Transactions on Automatic Control, Vol. 40, No. 3, pp. 419-425.
See also the discussion State Selection in the User's Guide of the Rotational library.
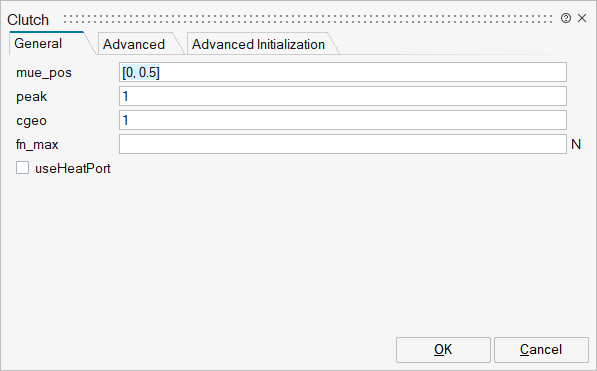
Parameters
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_mue_pos | mue_pos | [w,mue] positive sliding friction coefficient (w_rel>=0) | Matrix of size Mx2 | |
mo_peak | peak | Peak for maximum value of mue at w==0 (mue0_max = peak*mue_pos[1,2]) | Scalar | |
mo_cgeo | cgeo | Geometry constant containing friction distribution assumption | Scalar | |
mo_fn_max | fn_max | Maximum normal force | Scalar | |
mo_Unknown | Unknown | Value of mode is not known | Scalar | |
mo_Free | Free | Element is not active | Scalar | |
mo_Forward | Forward | w_relfric > 0 (forward sliding) | Scalar | |
mo_Stuck | Stuck | w_relfric = 0 (forward sliding, locked or backward sliding) | Scalar | |
mo_Backward | Backward | w_relfric < 0 (backward sliding) | Scalar | |
mo_unitAngularAcceleration | unitAngularAcceleration | Scalar | ||
mo_unitTorque | unitTorque | Scalar | ||
mo_useHeatPort | useHeatPort | =true, if heatPort is enabled | Number | 0 |
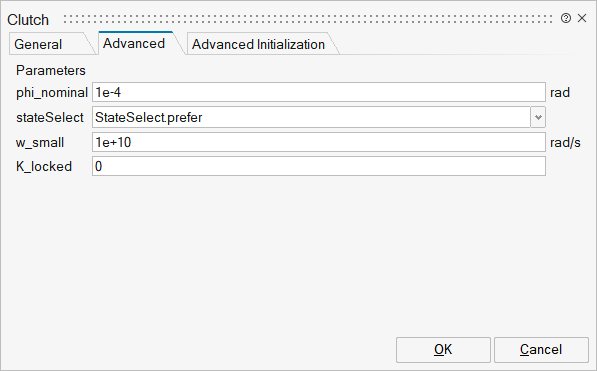
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_phi_nominal | phi_nominal | Nominal value of phi_rel (used for scaling) | Scalar | |
mo_stateSelect | stateSelect | Priority to use phi_rel and w_rel as states | Structure | |
mo_stateSelect/choice1 | StateSelect.never | Number | 0 | |
mo_stateSelect/choice2 | StateSelect.avoid | Number | 0 | |
mo_stateSelect/choice3 | StateSelect.default | Number | 0 | |
mo_stateSelect/choice4 | StateSelect.prefer | Number | 0 | |
mo_stateSelect/choice5 | StateSelect.always | Number | 0 | |
mo_w_small | w_small | Relative angular velocity near to zero if jumps due to a reinit(..) of the velocity can occur (set to low value only if such impulses can occur) | Scalar | |
mo_K_locked | K_locked | Gain driving the relative motion between the friction elements to 0 when locked. This parameter should only be non-zero when using the model with fixed-step integration | Scalar |
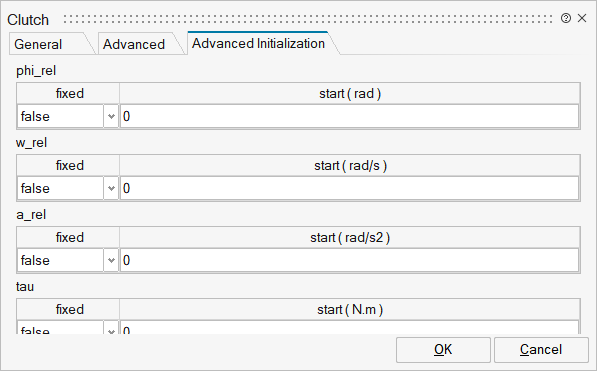
| Name | Label | Description | Data Type | Valid Values |
|---|---|---|---|---|
mo_phi_rel | phi_rel | phi_rel | Structure | |
mo_phi_rel/fixed | fixed | Cell of scalars | true | |
mo_phi_rel/start | start | Cell of scalars | ||
mo_w_rel | w_rel | w_rel | Structure | |
mo_w_rel/fixed | fixed | Cell of scalars | true | |
mo_w_rel/start | start | Cell of scalars | ||
mo_a_rel | a_rel | a_rel | Structure | |
mo_a_rel/fixed | fixed | Cell of scalars | true | |
mo_a_rel/start | start | Cell of scalars | ||
mo_tau | tau | tau | Structure | |
mo_tau/fixed | fixed | Cell of scalars | true | |
mo_tau/start | start | Cell of scalars | ||
mo_w_relfric | w_relfric | w_relfric | Structure | |
mo_w_relfric/fixed | fixed | Cell of scalars | true | |
mo_w_relfric/start | start | Cell of scalars | ||
mo_a_relfric | a_relfric | a_relfric | Structure | |
mo_a_relfric/fixed | fixed | Cell of scalars | true | |
mo_a_relfric/start | start | Cell of scalars | ||
mo_tau0 | tau0 | tau0 | Structure | |
mo_tau0/fixed | fixed | Cell of scalars | true | |
mo_tau0/start | start | Cell of scalars | ||
mo_tau0_max | tau0_max | tau0_max | Structure | |
mo_tau0_max/fixed | fixed | Cell of scalars | true | |
mo_tau0_max/start | start | Cell of scalars | ||
mo_free | free | free | Structure | |
mo_free/fixed | fixed | Cell of scalars | true | |
mo_free/start | start | Cell of scalars | ||
mo_sa | sa | sa | Structure | |
mo_sa/fixed | fixed | Cell of scalars | true | |
mo_sa/start | start | Cell of scalars | ||
mo_startForward | startForward | startForward | Structure | |
mo_startForward/fixed | fixed | Cell of scalars | true | |
mo_startForward/start | start | Cell of scalars | ||
mo_startBackward | startBackward | startBackward | Structure | |
mo_startBackward/fixed | fixed | Cell of scalars | true | |
mo_startBackward/start | start | Cell of scalars | ||
mo_locked | locked | locked | Structure | |
mo_locked/fixed | fixed | Cell of scalars | true | |
mo_locked/start | start | Cell of scalars | ||
mo_mode | mode | mode | Structure | |
mo_mode/fixed | fixed | Cell of scalars | true | |
mo_mode/start | start | Cell of scalars | ||
mo_lossPower | lossPower | lossPower | Structure | |
mo_lossPower/fixed | fixed | Cell of scalars | true | |
mo_lossPower/start | start | Cell of scalars | ||
mo_mue0 | mue0 | mue0 | Structure | |
mo_mue0/fixed | fixed | Cell of scalars | true | |
mo_mue0/start | start | Cell of scalars | ||
mo_fn | fn | fn | Structure | |
mo_fn/fixed | fixed | Cell of scalars | true | |
mo_fn/start | start | Cell of scalars | ||
mo_f_normalized | f_normalized | f_normalized | Structure | |
mo_f_normalized/fixed | fixed | Cell of scalars | true | |
mo_f_normalized/start | start | Cell of scalars |
Ports
| Name | Type | Description | IO Type | Number |
|---|---|---|---|---|
flange_a | implicit | Left flange of compliant 1-dim. rotational component | input | 1 |
flange_b | implicit | Right flange of compliant 1-dim. rotational component | output | 1 |
f_normalized | implicit | Normalized force signal 0..1 (normal force = fn_max*f_normalized; clutch is engaged if > 0) | input | 2 |
Port 4 | implicit | Optional port to which dissipated losses are transported in form of heat | input | mo_useHeatPort |