Les entités de référence : point, ligne, plan
Introduction
Une entité de référence apporte une aide à la construction de la géométrie sans être prise en compte lors des opérations de maillage et de résolution. Ces entités sont de nature dites « NO_EXIST ».
Il existe plusieurs entités de « Référence » :
- Point de référence
- Ligne de référence définie entre deux points
- Plan de référence
Quand les utiliser?
Le tableau ci-dessous présentent quand utiliser les entités de références.
| Entités de référence | Quand l'utiliser ? |
|---|---|
| Point de référence |
|
| Ligne de référence |
|
| Plan de référence |
|
Comment les créer?
Le tableau ci dessous présente comment créer les entités de références
| Entités de référence | Comment les créer ? |
|---|---|
| Point de référence |
La création d'un point de référence est identique à la création d'un point standard de Flux. Il faut définir le repère de création ainsi que les coordonnées (X Y Z). Pour créer un point de référence :
|
| Ligne de référence |
La création d'une ligne de référence est identique à la création d'une ligne standard de Flux de type segment. Il faut définir les deux points du segment à créer. Ces points peuvent être des points standards appartenant à des objets ou des points de référence préalablement créés.
|
| Plan de référence |
La création d'un plan de référence comprend plusieurs types de définition. (cf ci-dessous)
|
Type de plan de référence
Le tableau ci-dessous présente les différents types de création d'un plan de référence
| Type | Description | Illustration |
|---|---|---|
| Défini par une face (plane) | Le plan de référence est positionné sur le plan de la face qui doit obligatoirement être plane |
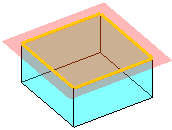
|
| Défini par un point et une ligne | Le plan de référence est positionné sur le plan décrit par le point sélectionné et les deux points de la ligne sélectionnée (la ligne doit obligatoirement être de type segment) |
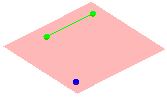
|
| Défini par 3 points | Le plan de référence est positionné sur le plan décrit par les 3 points sélectionnés |
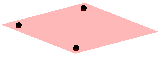
|
| Défini par un point et une ligne perpendiculaire | Le plan de référence est positionné sur le plan décrit par la projection orthogonal du point sélectionné sur la trajectoire de la ligne sélectionnée |
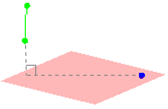
|
| Plan XY avec offset | Le plan de référence est positionné parallèlement au plan XY avec un décalage |
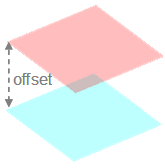
|
| Plan XZ avec offset | Le plan de référence est positionné parallèlement au plan XZ avec un décalage | |
| Plan YZ avec offset | Le plan de référence est positionné parallèlement au plan YZ avec un décalage | |
| Plan parallèle à un plan | Le plan de référence est positionné parallèlement au plan de référence sélectionné avec un décalage | |
| Défini par équation | Le plan de référence est positionné sur le plan décrit par l'équation Ax + Bx + Cx = D. L'utilisateur doit choisir les coefficients A, B, C et D. | |
| Défini par un angle entre deux plans | Le plan de référence est positionné avec un angle par rapport à un plan de référence sélectionné autour d'un axe (ligne sélectionnée) |
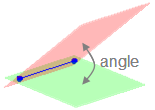
|
Plans de référence prédéfinis
Voici la liste des plans de référence prédéfinis disponible à l'ouverture du Modeleur :
- Plan XY
- Plan XZ
- Plan YZ
Repère correspondant
Pour chaque création de plan de référence (REFERENCEPLANE_1) un repère correspondant (COORDSYS_REFERENCEPLANE_1) est créée.