Ellipsoidal Surface to Node Contact (TYPE14)
This interface simulates impacts between a hyper-ellipsoidal rigid main surface and a list of secondary nodes. This interface is used for MADYMO to Radioss coupling.
The hyper-ellipsoidal surface is treated as an analytical surface (hyper-ellipsoidal surfaces are discretized only for post-processing).
- User defines total elastic force versus maximum penetration of nodes.
- A local friction coefficient is computed at each impacted node, depending upon elastic force computed at its location by scaling the total elastic force by the following factor: penetration of the node divided by sum of node penetrations.
- A local viscosity coefficient in the normal direction to the surface is computed at each impacted node, depending upon this node's velocity or the computed elastic force at its location.
It is also possible to only define a constant stiffness factor, a constant friction coefficient or a constant viscosity coefficient. A time step is computed to ensure stability.
Interface Hints

Figure 1. No Impact is Detected
The interface is designed to allow penetration of secondary nodes. However, the contact algorithm does not ensure that a node will not cross the ellipsoid when sliding; nodes may slide along the ellipsoid until they fully cross the ellipsoid, resulting in that the structure itself fully crossing the surface and contact force is no longer applied to it (as shown in Figure 2, where perfect sliding is considered).
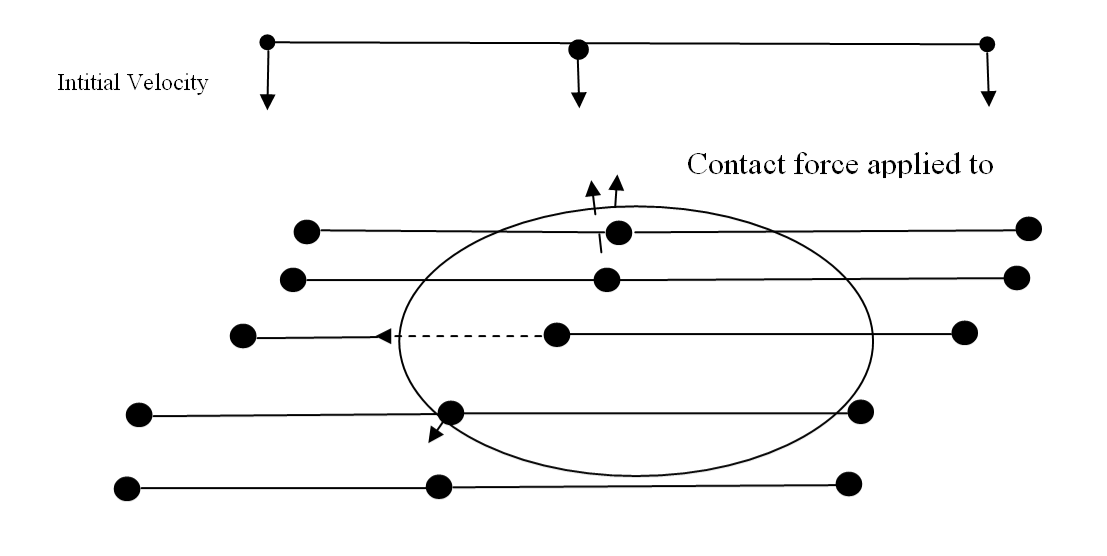
Figure 2. Sliding Until Structure Fully Crosses Surface