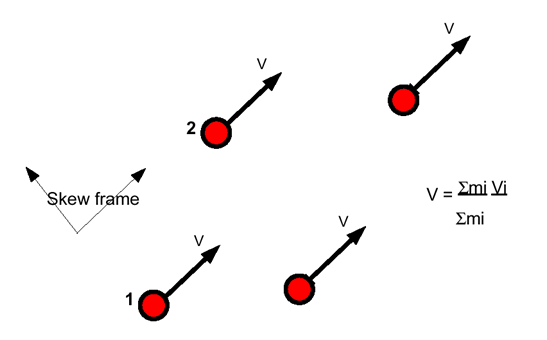
A rigid link imposes the same velocity on all secondary nodes in one or more directions. The
directions are defined to a skew or global frame. Figure 1 displays a rigid link. Figure 1. Rigid Link Model
The velocity of the group of nodes rigidly linked together is computed using momentum
conservation (Section Definition, Equation 1). However, no global moment equilibrium
is respected.(1)
Angular velocity for the ith DOF with respect to the global or a skew reference frame
is:(2)
For non-coincident nodes, no rigid body motion is possible.
A rigid link is equivalent to an infinitely stiff spring TYPE8.