유연체 컨택
유연체의 동작을 향상시키기 위해 FlexContact+ 및 FlexContact+ for Joints의 두 가지 방법을 사용할 수 있습니다. 두 방법 모두 유연체 결과 정확도를 개선하기 위해 지오메트리 기반 컨택 형태를 포함하며, 컨택 영역 응력/변형률과 조인트 위치 근처 응력/변형률의 사실적인 동작을 캡처합니다.
FlexContact+와 FlexContact+ for Joints를 사용해야 하는 시점은 언제입니까?
FlexContact+
슬롯의 핀과 같이 유연체에 정의된 일반 컨택이 있는 경우, FlexContact+를 사용하여 컨택 부하로 인한 컨택 인터페이스의 응력/변형률을 고려하여 유연체 동작을 개선할 수 있습니다.
FlexContact+ for Joints
구멍에 있는 실린더와 같이 핀이 아닌 조인트 연결이 있는 유연체를 모델링하는 경우, FlexContact+ for Joints 옵션을 사용하여 조인트부의 응력/변형률을 보다 자세히 캡처할 수 있습니다.
하이브리드 접근 방식
또한, 모델은 두 가지 방식이 하나 이상의 유연체 파트에 적용되는 하이브리드 접근 방식을 사용할 수 있습니다. 이는 예를 들어 캠 팔로워와 같이 유연한 파트에 자유 동작 컨택과 이와관련 지오메트리 기반 조인트가 모두 있는 경우에 유용할 수 있습니다. 캠과 팔로워는 피벗 중심에 조인트가 있을 수 있지만 두 파트이 상호 작용하는 일반적인 컨택도 있습니다. 캠 또는 팔로워 중 하나의 플렉스 해석을 수행하는 경우 하이브리드 접근 방식을 사용할 수 있습니다.
FlexContact+
모션 컨택에서 유연체를 사용할 때, 보다 포괄적이고 예측적인 해석을 수행하여 컨택 인터페이스에서 응력 또는 변형을 고려하십시오. 강체/유연체 및 유연체/유연체 파트 간의 컨택을 모델링할 수 있습니다.
Flex Contact+는 일반적인 파트 간 컨택에서 발생하는 하중과 관련된 유연체 변형을 처리하는 고유 프로세스를 사용합니다. 이 방법은 유연체 파트와 다른 강체 또는 유연체 파트 사이에 하나 이상의 모션 컨택이 있고 컨택 인터페이스에서 더 놓은 결과 정확도의 응력/변형률을 캡처하려는 경우에 유용합니다. 이 프로세스는 컨택 영역 및 동작을 기반으로 추가 유연체 모드 형상을 고려하여 기존 CMS(Component Mode Synthesis) 프로세스를 확장합니다. 결국, 이러한 모든 모드를 종합적으로 고려하여 향상된 버전의 CMS 유연체가 생성됩니다.

-
모션 해석 도구 위로 마우스를 이동한 다음 실행 설정
 위성 아이콘을 클릭합니다.
위성 아이콘을 클릭합니다.

FlexContact+ for Joints
FlexContact+ for Joints는 조인트 영역 주변에서 발생하는 하중과 관련된 유연체 변형을 설명합니다. 이 방법은 지오메트리 특징에 의해 정의된 조인트가 유연체에 연결되어 있고 파트 영역에서 조인트 근처의 응력/변형률의 더 높은 결과 정확도를 캡처할 때 적합합니다.
이 프로세스는 기존 CMS(Component Mode Synthesis)에서 사용되는 것과 동일한 정보를 사용하지만 유연한 파트와 다른 파트 사이의 조인트에 스파이더 연결을 사용하는 대신 스파이더가 제거되고 조인트 하중을 설명하는 추가 유연체 모드가 계산됩니다. 그 결과 조인트 주변의 변형으로 인한 실제적인 응력/변형률을 설명하는 유연체가 생성됩니다.
- 조인트는 핀 조인트 유형일 수 없습니다.
- 조인트에 위치한 지오메트리는 조인트가 파트 간 컨택으로 대체된 경우, 조인트가 의도한 자유도에 따라 동작하도록 실제 물리적 조인트를 나타내야 합니다.
컨택 조인트는 일반 모션 컨택처럼 동작합니다. 지오메트리와 접하는 지오메트리입니다. 컨택 조인트는 컨택 동작(경직도, 댐핑, 침투 및 지수)을 제어하기 위해 동일한 매개변수를 사용합니다. 간섭 및/또는 접촉(일치) 지오메트리를 피합니다. 가능한 경우 Inspire 지오메트리 도구를 사용하여 지오메트리를 수정하십시오.
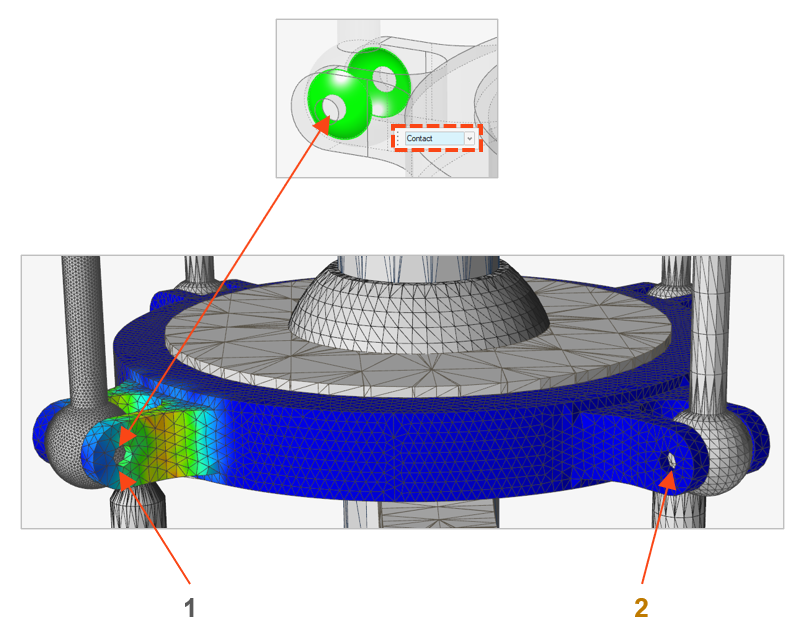 Figure 1. 1=FlexContact+ for Joints, 2=Traditional Flex Contact
Figure 1. 1=FlexContact+ for Joints, 2=Traditional Flex Contact-
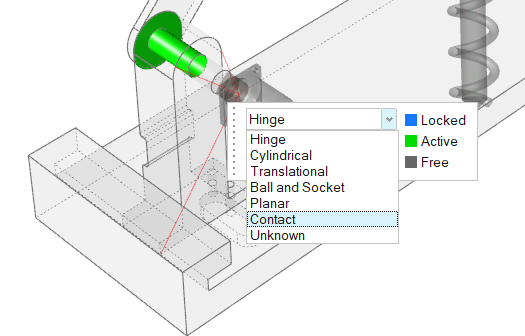
조인트를 두 번 클릭하고 유형을 Contact로 변경합니다.
-
모션 해석 도구 위로 마우스를 이동한 다음 실행 설정 위성 아이콘을 클릭합니다.
