MV-8002: Multi-Maneuver Events
In this tutorial, you will learn how to define end conditions for a maneuver or a sub-event, write parametric expressions, and to define events as multiple sub-events executed sequentially
- End conditions
- Conditions to end a particular maneuver before given simulation end time.
- Multi-maneuver events
- Events consisting for more than one maneuver – these maneuvers are executed sequentially.
- Parametric Expressions
- In a multi-maneuver event, expressions need to be re-evaluated before
the start of the maneuver in order to maintain the continuity of the signals.
- { Expression in Curly Braces }
- Instruction to driver to evaluate the expression before giving it to MotionSolve
- {SIGNAL}
- Evaluated as VARVAL(signal solver variable id)
- {SIGNAL_0}
- Evaluated as Signal Value at the end of last maneuver
- {%SIGNAL}
- Evaluated as {SIGNAL} – {SIGNAL_0}
-
Example:
- Throttle off cornering event in two maneuvers
-
- Maneuver 1
- Constant cornering in constant radius path with constant velocity until the roll angle reaches its maximum and stabilizes.
- Maneuver 2
- Step down the throttle while following the same path.
-
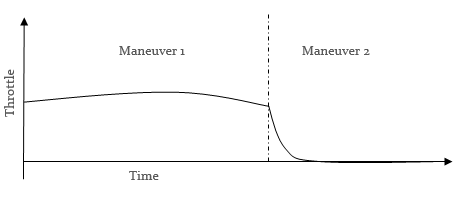 Figure 1.
Figure 1.
Assemble the Vehicle
Follow the instructions in Step #1 of tutorial MV-8000 to create the vehicle
with the topology as provided below.
| Page | Label | Selection |
|---|---|---|
| 1 | Model type | Full vehicle with advanced driver |
| 2 | Driveline configuration | Front wheel drive |
| 3 | Vehicle body | Body |
| 3 | Front subframe | None |
| 3 | Front suspension | Frnt macpherson susp (1 pc. LCA) |
| 3 | Steering linkages | Rackpin steering |
| 3 | Rear subframe | None |
| 3 | Rear suspension | Rear quadlink susp |
| 3 | Powertrain | Linear torque map powertrain |
| 3 | Tires | AutoTires |
| 4 | Steering column | Steering column 1 (not for Abaqus) |
| 4 | Steering boost | None |
| 5 | Front struts | Frnt strut (with inline jts) |
| 5 | Front stabilizer bars | Frnt stabar with links |
| 5 | Rear struts | Rear strut (with inline jts) |
| 5 | Rear stabilizer bars | Rear stabar with links |
| 6 | Front jounce bumpers | None |
| 6 | Front rebound bumpers | None |
| 6 | Rear jounce bumpers | None |
| 6 | Rear rebound bumpers | None |
| 7 | Disk brakes | Disk brakes |
| 7 | Front driveline | Independent fwd |
| 8 | Aerodynamic Forces | None |
| 9 | ABS/ESP System | None |
| 9 | Traction Control | None |
| 10 | Drive system | Altair Driver |
| 11 | Finish |
Adding Driver Analysis
-
Use the Task Wizard to load the driver analysis.
 Figure 2.
Figure 2. -
Select the AltairDriverFile as the Event Type and click
OK.
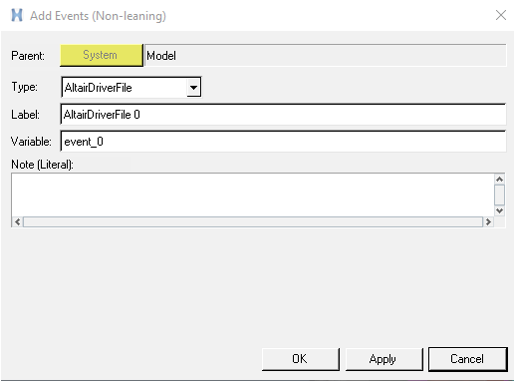 Figure 3.
Figure 3.
Write the Altair Driver File (ADF)
We will model a Fish Hook Event using three sequential maneuvers.
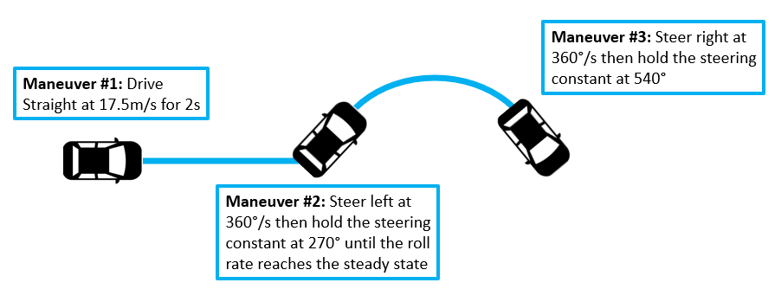
Figure 4.
-
Right-click on AltairDriverFile and select
Edit Event.
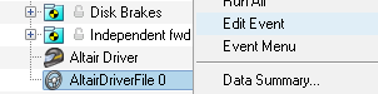
Figure 5. -
Enter the multievent.adf file and run the simulation.
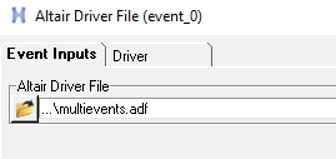
Figure 6. -
Plot in HyperGraph the Steering Angle and Roll Rate.

Figure 7. Steering Angle
Figure 8. Roll RateThe plots show the Maneuver 2 stopping when the roll rate is consistently 0 (with mentioned tolerance) for 0.5 seconds after the 3s. The simulation then changes to the Maneuver 3 with the vehicle turning to the right as specified in the multievent.adf.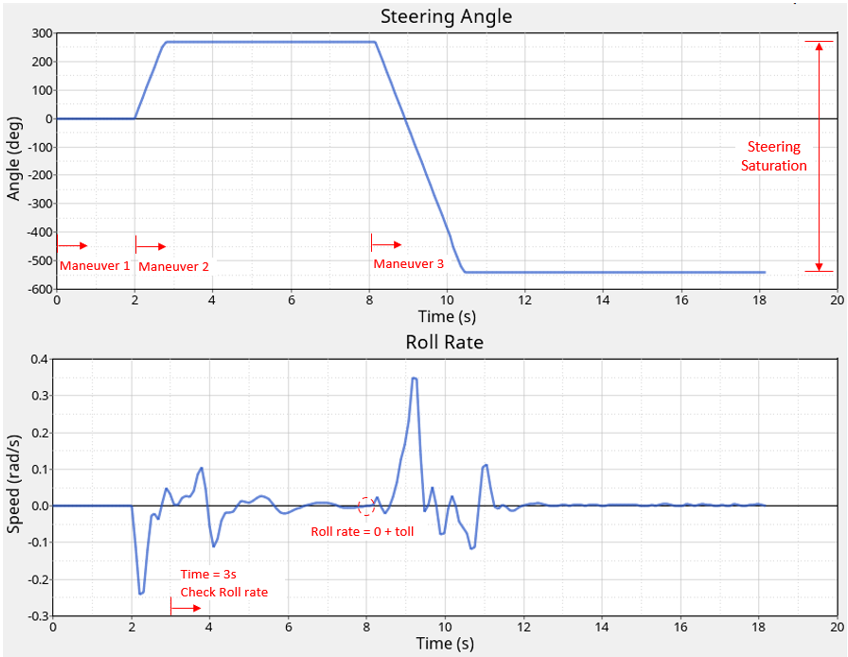 Figure 9.
Figure 9.