Biasing allows you to control the shape of a mesh when applying handle
perturbations.
Biasing increases or decreases the influence of a handle over the nodes within its area
of influence. If the biasing values for all of the handles are equal to 1.000, which is
the default value for all handles except for dependent handles on 1D domains, the
morphing between the handles is linear, provided both handles are global handles or they
are located on edge domains. Higher biasing values generate a smooth curvature near the
handles, while lower biasing values generate harsh corners near the handles. To smoothly
change the shape of a domain it is recommended that you use a biasing factor of 1.000 at
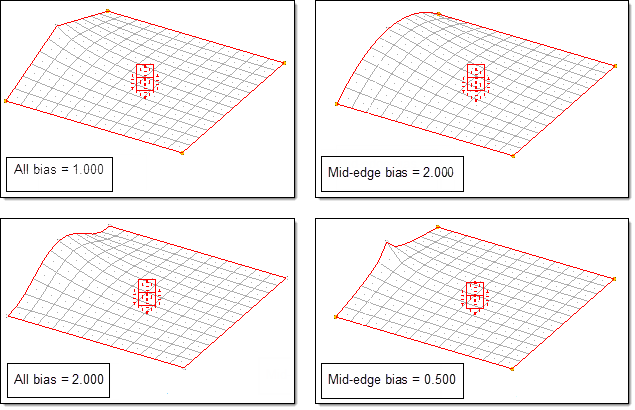
the corners, 2.000 at the edges, and 3.000 in the middle. Figure 1. Biasing for a 2D Domain. The model at the upper left has all five handles with the default biasing
value of 1.000. The model at the upper right shows the four corner handles with
a biasing value of 1.000, and the mid-edge handle with a biasing value of 2.000.
The model at the lower left has all five handles with the default biasing value
of 2.000. The model at the upper right shows the four corner handles with a
biasing value of 1.000 and the mid-edge handle with a biasing value of
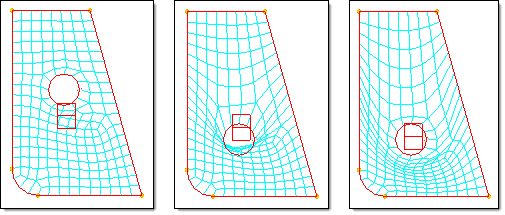
0.500. Figure 2. Biasing to Reduce Mesh Distortion. When the hole is moved downward with a biasing factor of 1.000 for the handle
at the hole, the mesh folds over due to the influences of the other handles
(middle frame). When the biasing value of the handle at the hole is increased to
3.000, the mesh unfolds (right frame).
Biasing can be applied retroactively after a morphing operation. After applying a morph,
you can change the biasing value by selecting the make
retroactive checkbox, and have the current list of applied morphs
updated to reflect the new biasing values. This is useful in selecting a good biasing
value to apply for a given morph. Apply the morphs and change the biasing values
retroactively until you get the shape that you want.