Altair MotionView 2022.2 Release Notes
Altair Multi Body Solutions 2022.2 Release Notes
Highlights
The Altair Multi Body Solutions 2022.2 release includes the following enhancements
and bug fixes to MotionView and MotionSolve:
- Save Interval
- Run workflow updates
- Entity Editors
- Vector entity workflow
- Support for automatic simulation saves at specified intervals
- New Transfer Case with differential model added for 4WD vehicles in the Assembly Wizard
- IC engine powertrain model added for 4WD vehicles in the Assembly Wizard
- Locking differential system available for vehicles in the Assembly Wizard
- Road Tools performance enhancement
New Features
- Automatic Incremental Save
- You can now instruct MotionSolve to save the model and states during
simulation in specified intervals. Invoke this feature using the
Param_Simulation model statement by adding the
attributes save_increment and
save_inc_overwrite to the XML input file.
Automatically saving models is particularly useful for long simulations
of complex models and/or co-simulation with other solvers. If, for some
reason, the simulation or co-simulation gets interrupted, then
MotionSolve can restart a simulation from the last successful saved
state, instead of re-starting the simulation from the beginning.
Furthermore, you can branch off from a saved model/states and perform
model modifications and/or alternative analyses. Currently,
save_increment is only available for MotionSolve.
UI support in MotionView is planned for a future release.
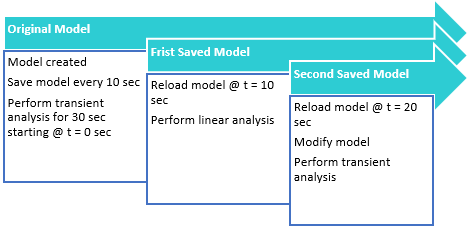
Figure 1. - New Transfer Case with Differential Model Added for 4WD Vehicles in the Assembly Wizard
- The Car/Small truck vehicle library in MotionView contains a new
Transfer case with a center diff model. This is located in option.
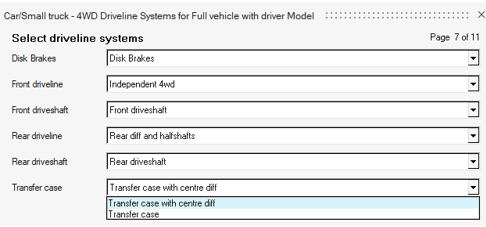
Figure 2. - IC Engine Powertrain Model Added for 4WD Vehicles in the Assembly Wizard
- The Car/Small truck vehicle library in MotionView contains a new option
for the IC Engine Friction Clutch (Manual) powertrain model for Four
Wheel Drive vehicles.
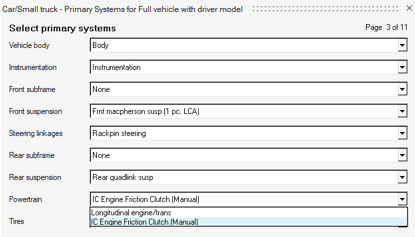
Figure 3. - Locking Differential System Available for Vehicles in the Assembly Wizard
- A new differential locking system was added to the MotionView Assembly
Wizard for Car/Small Trucks and Heavy Trucks.
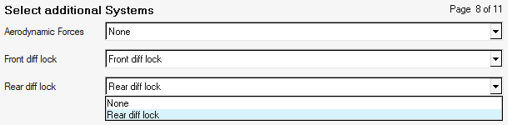
Figure 4.
Enhancements
- Run Workflow Updates
- The new Run workflow in HyperWorks supports co-simulation with EDEM. In addition, several issues related to solving models containing 2D contacts, deformable curves, and so on have been resolved.
- Entity Editor
- More entities have an Entity Editor in HyperWorks. Editors are now available for the SolverVariable, SolverString, SolverDiff, Outputs, Polybeam, and Vector entities.
- Vector Entity Workflow
- The Vector entity has also been enhanced to provide an origin for the
vector and graphic visibility. The vector can be oriented along an
existing point entity. In the HyperWorks interface, the vector entity
can also be oriented graphically.
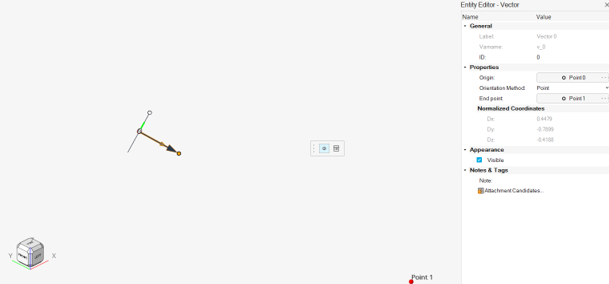
Figure 5. - Linear Sparse Solver
- At each Newton iteration, MotionSolve solves the linear systems of equations for , where is a sparse, unsymmetric Jacobian matrix, includes the unknown differences in states, and represents the right hand side. You can now choose between HARWELL, PARDISO, or user-defined sparse solver using SPARSESUB. The default solver is HARWELL; that works best in most applications. The type of linear sparse solver can be selected via the Param_Simulation command in the XML input file and is intended for advanced users only. There is no user interface support for this feature in MotionView.
- New Model Function - Distance
- MotionView has a new model function to calculate distance between entities. Syntax: distance(entity1, entity2).
- Road Tools Performance Enhancement
- The road files generated using the Road Tools are now saved as *.h3d files instead of *.obj files. This modification brings significant performance improvement related to road generation time, loading time, and output file size.
Minor Enhancements
- The default maximum iteration for the static solver has been increased to 750.
- In previous releases, the co-simulation was not able to take full advantage of EDEM running on GPUs. In this release, the coupling with EDEM has been enhanced such that EDEM can now better utilize the advantages of GPUs while co-simulating with MotionSolve.
- Flexprep: Craig-Chan-Contact is now supported on Linux
- The modeling statement Post: Graphic has been extended with a new clearance attribute for Triamesh graphics that allows you to superimpose clearance to the existing mesh. The clearance helps meshed graphics in contact with a tight fit to avoid friction and penetration due to the mesh discretization.
- MotionSolve includes the Conditional Numerical Reproducibility (CNR) from Intel® MKL on Windows and Linux. This feature allows MotionSolve to obtain reproducible floating-point results from run-to-run, even if the number of computational threads varies. This feature also improves the reproducibility from PC-to-PC, as long as they have the same architecture and operating system.
- Flexprep is enhanced to use a file for the interface nodes. A keyword argument, -INODESPATH, can be provided followed by a text file containing the node numbers as interface nodes.
- Batch co-simulation with EDEM provides a message if the EDEM installation cannot be found
Known Issues
- Live animation for flexbodies in the HyperWorks interface shows only the rigid movement of the flexbody. No deformation is shown. This issue will be addressed in a future release.
- Auto assignment of nodes for a flexbody during solver export may assign a coincident node at the interface node location and not the interface node itself. The workaround is to assign the nodes from the Nodes dialog in the flexbody entity.
Resolved Issues
- Properties in the compliant joint are not shown in the Entity Editor with multiple selection.
- Picked entity is not highlighted for Curve Graphic references when invoked from the Entity Editor.
- File graphic with locator data has incorrect settings for Auto Position and Orient option.
- Incorrect truncation of X data value more than 100 leads to curve visualization error.
- Reference collector in the guidebar for picking single entity allows picking paired entities.
- Application error when using the space bar on Derive from Graphics in the Body Entity Editor.
- Large loading time when loading a full vehicle model using large file graphics.
- A crash is observed when editing Notes for many entities together with the Entity Editor.
- Gravity dialog does not appear on Linux.
- MotionView does not report an error when a motion is applied on a compliant joint.
- Curve interpolation fails in some instances due to precision issue.
- Application error encountered when changing solvermode after adding an NLFE body.
- Application crashes while accessing the Materials dialog after clearing the model.
- Application error encountered in certain cases during co-simulation with FMU generated from MotionView.
- Cannot isolate graphics belonging to Ground Body.
- CM-Labs Vortex translator: Several translation issues are addressed.
- Flexbody with a different body coordinate system is not properly positioned when solved through msolve Py.
- Strain and Stress distribution in ANCF beams was not visualized correctly in HyperView.
- ARYVAL was not working after resizing a smaller Y Array used in GSE.
- FIM_S used to return mode 5 (static) even if a quasi-static simulation was running.
- There were some wrong and misleading component names in the *.abf file when the attribute ypr = True was used in the output requests of the MSolve-API.
- Saving and reloading a model with TriaMesh contact used to turn around all normal orientations such that the reloaded model fails.
- Automated report for Tire Envelope Analysis was showing the raw template statements. To see the report, you had to press the Evaluation Mode Control button in the TextView client. This is now fixed and no further operation is needed in TextView when plotting the report of the Tire Envelope analysis.
- AutoEntities were failing when specifying a curve data with only two points. The interpolation code was updated with the newest MotionSolve implementation.
- Support for simulation parameters in the leaf spring property file (*.lpf) is now available.
- Tire output requests showing non-zero values when AutoTires were deactivated in MotionView.
- A list of TNO roads no longer supported by Siemens (MF-Tire and MF-Swfit provider) was removed from the HyperWorks installation and a new set of roads, representing the same functionality, were included under Altair Roads <INSTALL_DIR>\hwdesktop\hw\mdl\autoentities\properties\Tires\ALTAIR_ROADS.
- Steering limit block in the Altair Driver File (*.adf) was not accepting the MIN and MAX steering values for open loop events.
- N-Post signal dialog showing compressed table and field options in high display resolution screens.
- Auxiliary Post graphics failing to display when being created in the N-Post event.