Generating Position and Gradients for Loaded Configuration
The following process can be used to generate a CSV file
containing the position and gradients for loaded configuration, which can then be
imported and saved into a MotionView model.
Start with the NLFE Body in a No Load configuration and apply Force/Motion to
load the NLFE Body as needed.
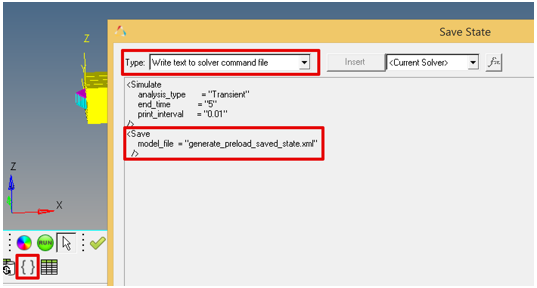
Include the MotionSolve Save command to save the states of the model into an
XML file (herein referred as “saved state XML”) after the Simulate command. A
template that writes into the solver command section can be used in MotionView.
Figure 1.
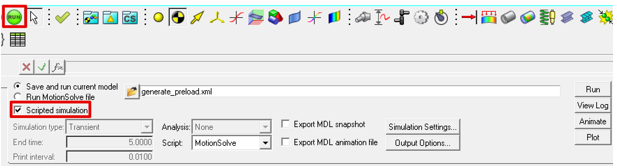
Solve the model. From the MotionView Run panel, use the Scripted simulation
option.
Figure 2.
Use a python script “NLFE_generate_loaded_csv.py” available in the Hyperworks
install (install_location/utility/mbd/NLFE) to extract the final loaded state of
the NLFE Body and save it into a CSV file. The python executable “python.exe”
(if not installed separately) can also be found in the Hyperworks install
(install_location/hw/python\python27\win64).
Figure 3.
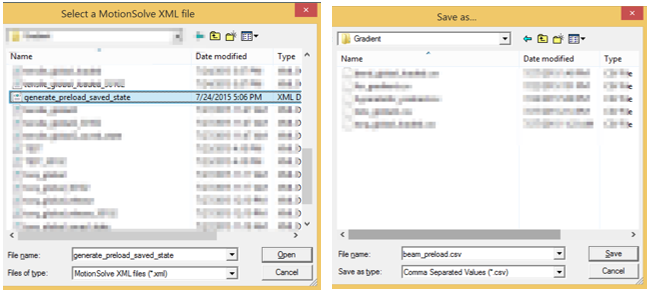
The script will prompt you to open the saved state XML file and also
provide a CSV file name to save the position and gradients information.Figure 4.
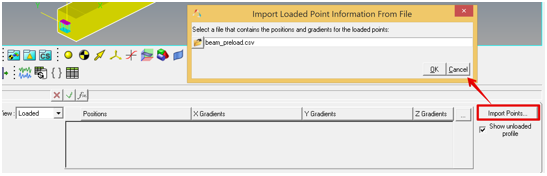
Once the CSV file is saved, import it into MotionView using the Import Points
option available in the Loaded View of the NLFE Connectivity tab.
Figure 5.
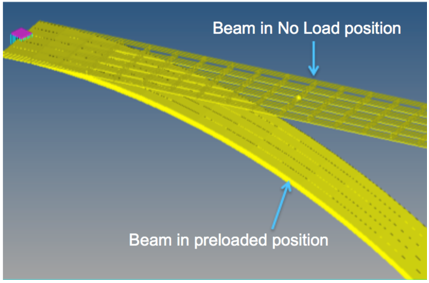
Upon importing the loaded configuration, the display of the NLFE Body in
graphics area would change. The NLFE Body loaded configuration gets the
prominent display with solid implicit graphics while the no load configuration
will be shown in a wireframe featured mode. Figure 6.