TYPE15 interface between surfaces made up of 4-node or 3-node segments and hyper-ellipsoids is a
penalty contact interface without damping.
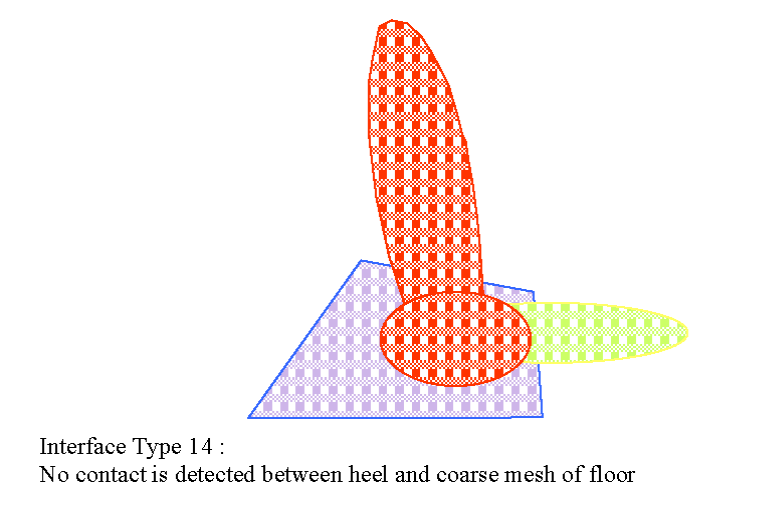
It applies to TYPE14 interface, especially when the mesh is coarser than the ellipsoid size.
Remember that in such a case, TYPE14 interface is able to compute low quality contact forces
even if it fails to find contact. Figure 1. No Contact is Detected
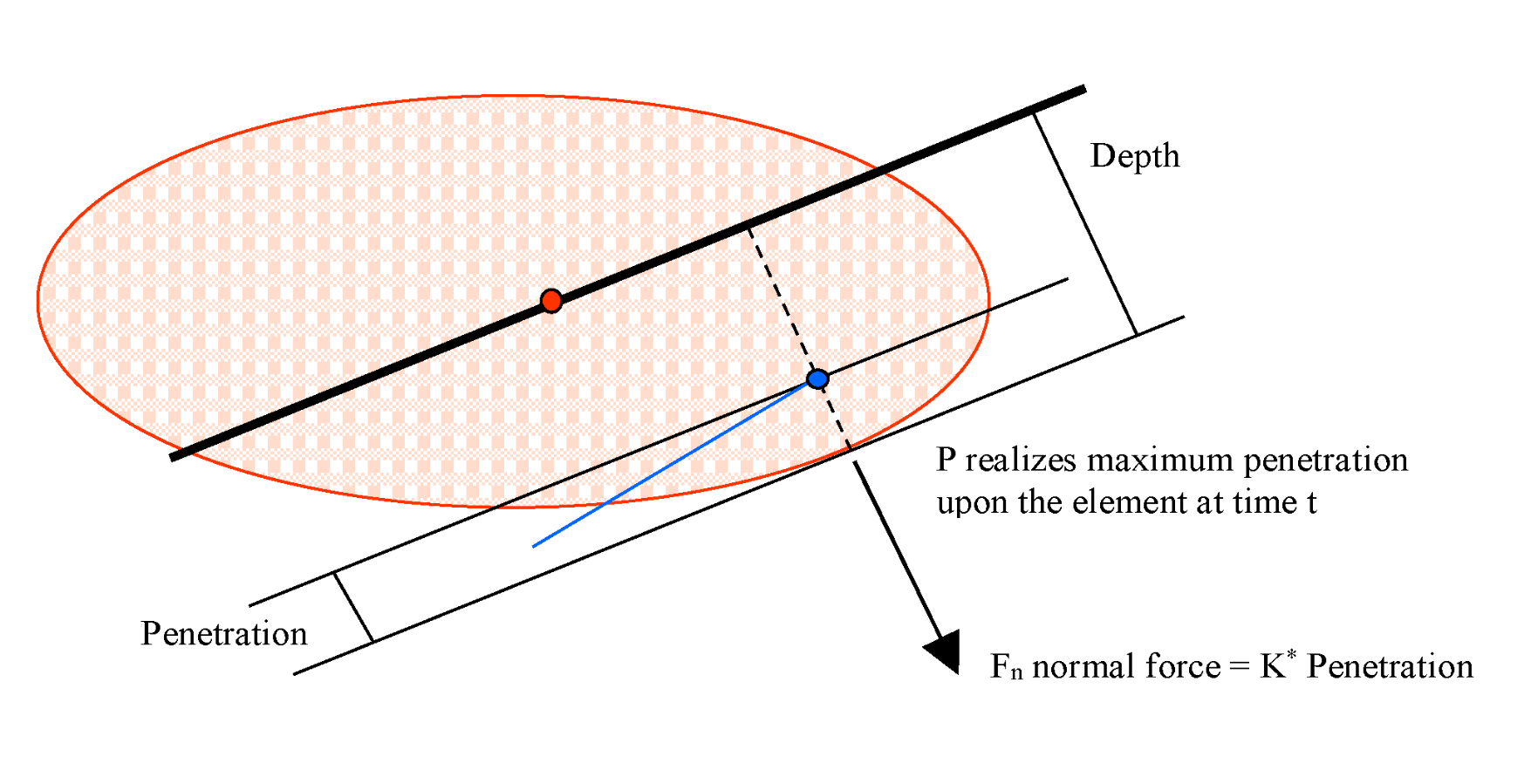
Interface stiffness is a nonlinear increasing function of penetration, computed in order to avoid
penetrations up to half the ellipsoid:
Where,
Input stiffness factor
Figure 2. Penetration is Detected
A Kinematic Time Step is computed so that the element does not cross the line Lt within one time step.
A friction coefficient m is input.
Interface takes into account sliding/rolling effects.