力浏览器
使用“力浏览器”工具将运动分析中的力和扭矩矢量可视化。
点击“运动”功能区的力浏览器工具即可打开该工具。

在运行过程中或回放结果时,可视化功能适用于铰接、转动电机、运动接触和其他实体。这有助于理解载荷在机构中的变化情况,还有助于进行展示和调试。
位置:“运动”功能区,“复查”编组
在运行过程中或回放结果时,可视化功能适用于铰接、转动电机、运动接触和其他实体。这有助于理解载荷在机构中的变化情况,还有助于进行展示和调试。
显示选项
所列选项可以让您控制每个实体的可见性。“力浏览器”不会为模型浏览器中隐藏的实体绘制矢量。
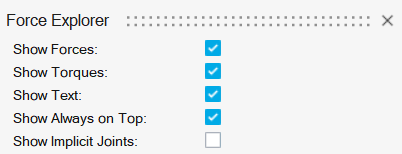
图 1. 力浏览器
- 显示力
- 在运动运行中显示或隐藏所有力。
- 显示扭矩
- 在运动运行中显示或隐藏所有扭矩。
- 显示文本
- 显示或隐藏与力和扭矩相关联的数值。运动接触不会显示数值,除非您已选中“接触力”下的“总力”选项。
- 总是在顶端显示
- 始终在几何体顶部显示所绘制的力和扭矩矢量。
- 显示隐藏的铰接
- 显示或隐藏与隐藏的铰接相关联的所有力和扭矩矢量。

- 使用实体按钮切换与特定运动实体相关联的力/扭矩的可见性。按钮的数量会随着模型中运动实体类型的变化而变化;在运行分析时也可以切换。
提示:
- 请记住,显示过多的矢量和文本会放慢动画回放速度。我们建议关闭您不需要进行可视化的信息。
- 铰接的实体按钮默认关闭,从而将所绘制的矢量数量减至最小。
- 对于“控制器类型”为“软约束”的转动电机或平动电机,不会绘制力/扭矩矢量。
- 在查看运动的结果时,可以选中力和扭矩矢量进行绘图。
- 您可以停驻或移动“力浏览器”。
接触力
“接触力”区域可让您控制运动接触力的可见性。
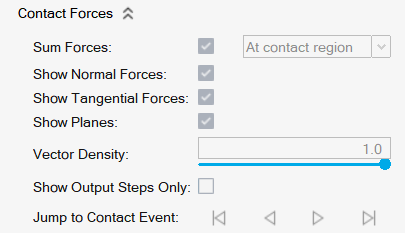
图 2. 接触力
- 总力
- 该选项将若干个力矢量转换成相当的力/扭矩组合。未经检查时,不报告数值。
- 显示法向力
- 显示或隐藏接触法向力分量。
- 显示切向力
- 显示或隐藏接触摩擦力分量。
- 显示平面
- 显示或隐藏在法向矢量箭头基部上绘制的平面。
- 向量密度
- 使用滑块可减少为接触区域绘制的矢量的数量。值为 1 时,会显示所有矢量;值为 0 时,只会显示一个矢量。
- 仅显示输出步骤
- 运动接触的结果通常有中间帧穿插在输出步骤之间,用于接触可视化。您可以使用此选项来抑制中间帧,只显示输出步骤。当您希望回放输出帧之间的时间间隔一致时,这是很有用的。
- 跳至接触事件
- 暂停动画回放时,您可以跳转至第一个、上一个、下一个或最后一个接触事件。如果按住“上一步”或“下一步”按钮,它将自动重复。
高级选项
“高级”选项可让您缩放接触力和扭矩,以及确定是否要显示作用力或反作用力。
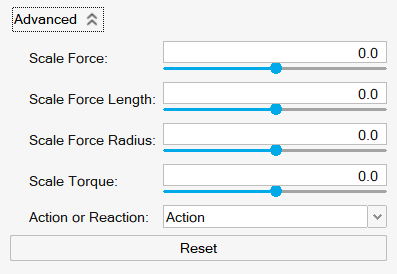 图 3. 高级选项
图 3. 高级选项- 缩放力
- 拖动滑块可缩放与模型相对的力矢量。
- 缩放力长度
- 拖动滑块可更改力矢量的长度。
- 缩放力半径
- 拖动滑块可更改力矢量的半径。
- 缩放扭矩
- 拖动滑块可缩放与模型相对的扭矩矢量。
- 作用力或反作用力
- 选择是否显示作用力、反作用力或两者均显示。