grsm
Find the constrained minima of a real multi-objective function.
Syntax
x = grsm(@func,x0)
x = grsm(@func,x0,A,b)
x = grsm(@func,x0,A,b,Aeq,beq)
x = grsm(@func,x0,A,b,Aeq,beq,lb,ub)
x = grsm(@func,x0,A,b,Aeq,beq,lb,ub,nonlcon)
x = grsm(@func,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
[x,fval,info,output] = grsm(...)
Inputs
- func
- The function to minimize.
- x0
- An estimate of the location of a minimum.
- A
- A matrix used to compute
A*xfor inequality contraints. - b
- The upper bound of the inequality constraints
A*x<=b. - Aeq
- A matrix used to compute
Aeq*xfor equality contraints. - beq
- The upper bound of the equality constraints
Aeq*x=beq. - lb
- The design variable lower bounds.
- ub
- The design variable upper bounds.
- nonlcon
- The non-linear constraints function.
- options
- A struct containing options settings.
Outputs
- x
- The locations of the multi-objective minima.
- fval
- The multi-objective function minima.
- info
- The convergence status flag.
- output
- A struct containing iteration details. The members are as follows.
- Pareto
- A logical matrix indicating which samples belong to the Pareto Front. Each column contains the front information for an iteration.
- nfev
- The number of function evaluations.
- xiter
- The candidate solution at each iteration.
- fvaliter
- The objective function values at each iteration.
- coniter
- The constraint values at each iteration. The columns will contain the constraint
function values in the following order:
- linear inequality contraints
- linear equality constraints
- nonlinear inequality contraints
- nonlinear equality constraints
Examples
Plot the iterations and Pareto Front for the function
ObjFunc.
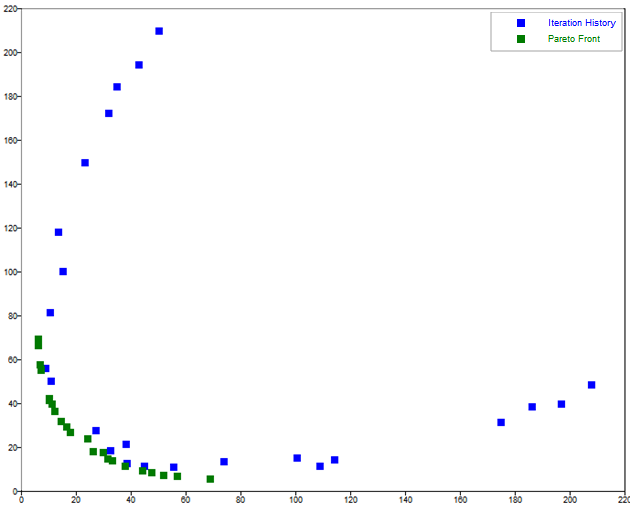
Figure 1. grsm figure 1
function obj = ObjFunc(x)
obj = zeros(2,1);
obj(1) = 2*(x(1)-3)^2 + 4*(x(2)-2)^2 + 6;
obj(2) = 2*(x(1)-3)^2 + 4*(x(2)+2)^2 + 6;
end
init = [2; 0];
lowerBound = [1, -5];
upperBound = [5, 5];
options = grsmoptimset('MaxIter', 50);
[x,fval,info,output] = grsm(@ObjFunc,init,[],[],[],[],lowerBound,upperBound,[],options);
obj1 = output.fvaliter(:,1);
obj2 = output.fvaliter(:,2);
scatter(obj1, obj2);
hold on;
obj1P = fval(:,1);
obj2P = fval(:,2);
scatter(obj1P, obj2P);
legend('Iteration History','Pareto Front');Figure 1. grsm figure 1
Modify the previous example to pass extra parameters to the function using a function
handle.
function obj = ObjFunc(x,p1,p2)
obj = zeros(2,1);
obj(1) = 2*(x(1)-3)^2 + 4*(x(2)-2)^2 + p1;
obj(2) = 2*(x(1)-3)^2 + 4*(x(2)+2)^2 + p2;
end
handle = @(x) ObjFunc(x,7,8);
[x,fval] = grsm(handle,init,[],[],[],[],lowerBound,upperBound,[],options);Comments
grsm uses a Global Response Surface Method.
See the fmincon optimization tutorial, Compose-4030: Optimization Algorithms in OML, for an example with nonlinear constraints.
Options are specified with grsmoptimset. The defaults are as follows:
- Display: 'off'
- InitSamPnts: min(20,n+2)
- MaxFail: 20,000
- MaxIter: 50
- PntsPerIter: 2
- Seed: 0
- StopNoImpr: 1,000
- TolCon: 0.5 (%)
Unbounded limits design variable limits are not fully supported and are set to -1000 and 1000. Use of large limits is discouraged due to the size of the search area.
To pass additional parameters to a function argument, use an anonymous function.