Fekoからのレーダー反射断面積のインポート
選択したオブジェクトをFekoからインポートした散乱情報に置き換えると、WinPropでの光線光学シミュレーションを加速できます。
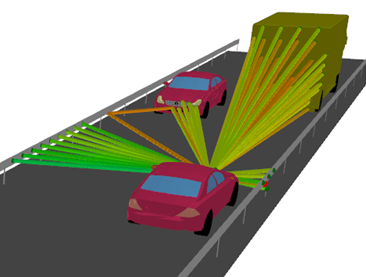
図 1. 自動車のレーダーシステムの例
欠点は、オブジェクト(自動車など)を十分正確に近似するには、多くのオブジェクト(多くのサーフェスパネル)が必要となる可能性があることです。このため、シミュレーションには時間がかかる可能性があります。
代わりに、Fekoでレーダー断面(RCS)シミュレーションを実行し、WinPropでそのシミュレーション結果を使用するアプローチもあります。これで、WinPropのオブジェクトは簡単になります。単なるボックスだけにすることもできます。レイがこの簡単なモデルに当たるたびに、FekoからのRCS情報を使用してモノスタティック反射が計算されます。近傍界では波面はこれ以上平らにならないため、ProManは、有限の距離を考慮するよう、自動的に(遠方界)RCSを修正します。
FekoシミュレーションでのRCS情報を含む必要なファイルを生成するには、Fekoで平面波入射の角度掃引を使用したモノスタティックRCSシミュレーションを設定します。Fekoで遠方界を要求します。オプションCalculate fields in plane wave incidence directionを選択し、モノスタティックRCSを取得します。遠方界要求のAdvancedタブで、ASCIIファイルへの出力を選択します。Fekoソルバーにより、.ffeファイルがディスクに書かれます。
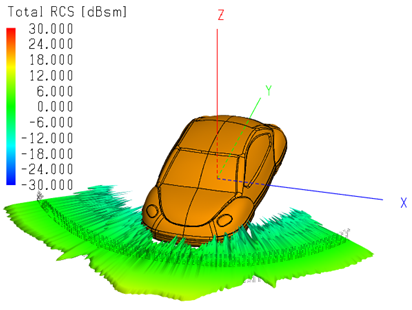
図 2. FekoでのモノスタティックRCS結果の例
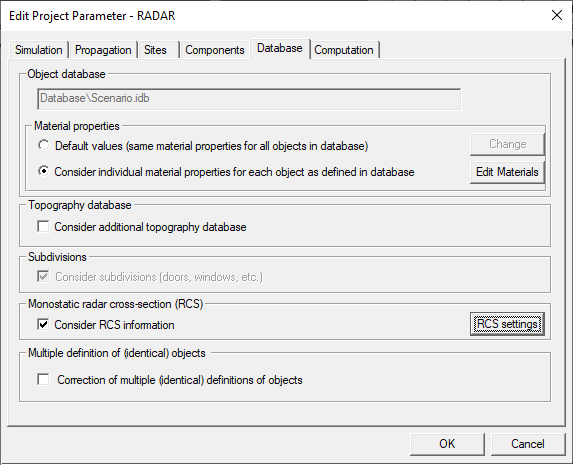
図 3. Edit Project ParameterダイアログのDatabaseタブ
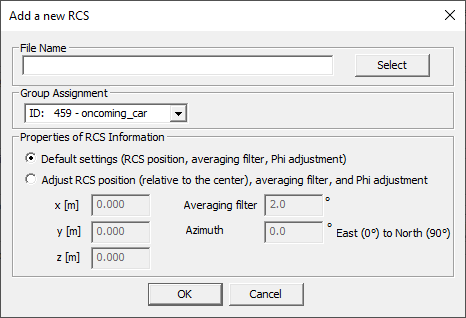
図 4. Add a new RCSダイアログ
原点の位置は、実際の対象シナリオに応じて調整できます。特に、RCS原点のZ座標は、WinPropシミュレーションのレーダーシステムの高さに応じて調整すると便利なことがよくあります。
- θはZ軸(垂直軸など)との角度です。
- φは東から反時計方向の角度です。
自動車などのオブジェクトがFekoとWinPropのシミュレーションで方向が異なる場合、方位角は調整することができます。
FekoからのRCS結果は、高周波数において、数度以内で何dBも異なる可能性があるため、平均化フィルタが提供されています。レーダーシステムやその他のオブジェクトが複雑なシナリオで移動する現実においては、低反射と高反射が急速に入れ替わります。また、距離が有限であるため、遠方界RCSの深いnullが埋められます。したがって、より現実的な結果を得るため、平均化フィルタの適用は適切です。