 Package Modelica.Mechanics.Rotational.Examples.Utilities
Package Modelica.Mechanics.Rotational.Examples.UtilitiesUtility classes used by rotational example models
Package Modelica.Mechanics.Rotational.Examples.Utilities
This package contains utility models and functions used by some of the example models from the rotational mechanics package.
Extends from Modelica.Icons.UtilitiesPackage (Icon for utility packages).
| Name | Description |
|---|---|
DirectInertia | Input/output block of a direct inertia model |
InverseInertia | Input/output block of an inverse inertia model |
Spring | Input/output block of a spring model |
SpringDamper | Input/output block of a spring/damper model |
SpringDamperNoRelativeStates | Linear 1D rotational spring and damper in parallel (phi and w are not used as states) |
 Model Modelica.Mechanics.Rotational.Examples.Utilities.DirectInertia
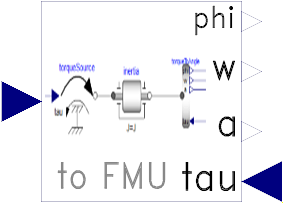
Model Modelica.Mechanics.Rotational.Examples.Utilities.DirectInertia
A rotational component with pure signal interface which can be applied for
a FMU (Functional Mock-up Unit)
exchange.
The input torque tauDrive is applied on one side of a rotational
component with inertia whereby the input torque tau is applied
on the other side of it.
Extends from Modelica.Blocks.Icons.Block (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
Inertia | J | 1 | Inertia |
| Type | Name | Description |
|---|---|---|
input RealInput | tauDrive | Accelerating torque acting at flange (= -flange.tau) |
output RealOutput | phi | Inertia moves with angle phi due to torque tau |
output RealOutput | w | Inertia moves with speed w due to torque tau |
output RealOutput | a | Inertia moves with acceleration a due to torque tau |
input RealInput | tau | Torque to drive the inertia |
 Model Modelica.Mechanics.Rotational.Examples.Utilities.InverseInertia
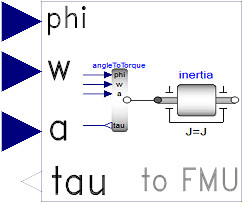
Model Modelica.Mechanics.Rotational.Examples.Utilities.InverseInertia
A rotational component with pure signal interface which can be applied for
a FMU (Functional Mock-up Unit)
exchange.
Based on the kinematic inputs applied on a component with inertia
the output torque tau is returned.
Extends from Modelica.Blocks.Icons.Block (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
Inertia | J | 1 | Inertia |
| Type | Name | Description |
|---|---|---|
input RealInput | phi | Angle to drive the inertia |
input RealInput | w | Speed to drive the inertia |
input RealInput | a | Acceleration to drive the inertia |
output RealOutput | tau | Torque needed to drive the flange according to phi, w, a |
 Model Modelica.Mechanics.Rotational.Examples.Utilities.SpringDamper
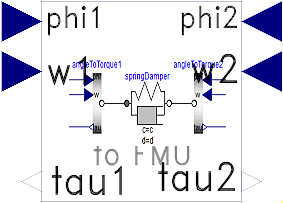
Model Modelica.Mechanics.Rotational.Examples.Utilities.SpringDamper
A linear 1D rotational spring and damper in parallel with pure signal interface which can be applied for a FMU (Functional Mock-up Unit) exchange.
Extends from Modelica.Blocks.Icons.Block (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
RotationalSpringConstant | c | 10000 | Spring constant |
RotationalDampingConstant | d | 1 | Damping constant |
Angle | phi_rel0 | 0 | Unstretched spring angle |
| Type | Name | Description |
|---|---|---|
input RealInput | phi1 | Angle of left flange of force element |
input RealInput | w1 | Speed to left flange of force element |
output RealOutput | tau1 | Torque generated by the force element |
input RealInput | phi2 | Angle of right flange of force element |
input RealInput | w2 | Speed to right flange of force element |
output RealOutput | tau2 | Torque generated by the force element |
 Model Modelica.Mechanics.Rotational.Examples.Utilities.Spring
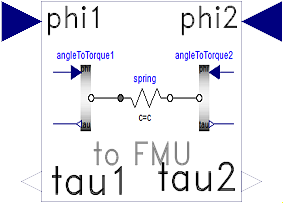
Model Modelica.Mechanics.Rotational.Examples.Utilities.Spring
A linear 1D rotational spring with pure signal interface which can be applied for a FMU (Functional Mock-up Unit) exchange.
Extends from Modelica.Blocks.Icons.Block (Basic graphical layout of input/output block).
| Type | Name | Default | Description |
|---|---|---|---|
RotationalSpringConstant | c | 10000 | Spring constant |
Angle | phi_rel0 | 0 | Unstretched spring angle |
| Type | Name | Description |
|---|---|---|
input RealInput | phi1 | Angle of left flange of force element |
output RealOutput | tau1 | Torque generated by the force element |
input RealInput | phi2 | Angle of right flange of force element |
output RealOutput | tau2 | Torque generated by the force element |
 Model Modelica.Mechanics.Rotational.Examples.Utilities.SpringDamperNoRelativeStates
Model Modelica.Mechanics.Rotational.Examples.Utilities.SpringDamperNoRelativeStates
A spring and damper element connected in parallel. The component can be connected either between two masses to describe the joint elasticity and damping, or between a mass and the housing (component Fixed), to describe a coupling of the element with the housing via a spring/damper.
This is the same element as Rotational.Components.SpringDamper but with the only difference, that the relative quantities are not used as states. If the relative states are potentially used as states, "a_rel = der(w_rel)" is present, and then exporting this model as FMU requires to also have the accelerations in the flanges as inputs, which is usually not desired for a force element.
Extends from Modelica.Mechanics.Rotational.Interfaces.PartialCompliant (Partial model for the compliant connection of two rotational 1-dim. shaft flanges) and Modelica.Thermal.HeatTransfer.Interfaces.PartialElementaryConditionalHeatPortWithoutT (Partial model to include a conditional HeatPort in order to dissipate losses, used for textual modeling, i.e., for elementary models).
| Type | Name | Default | Description |
|---|---|---|---|
RotationalSpringConstant | c | Spring constant | |
RotationalDampingConstant | d | Damping constant | |
Angle | phi_rel0 | 0 | Unstretched spring angle |
Boolean | useHeatPort | false | =true, if heatPort is enabled |
| Type | Name | Description |
|---|---|---|
Flange_a | flange_a | Left flange of compliant 1-dim. rotational component |
Flange_b | flange_b | Right flange of compliant 1-dim. rotational component |
HeatPort_a | heatPort | Optional port to which dissipated losses are transported in form of heat |