Working with Legacy Graphics
-
Load the graphic h3d with defective mesh in HyperView as the model input. Turn off the result input option as shown. Click
Apply.
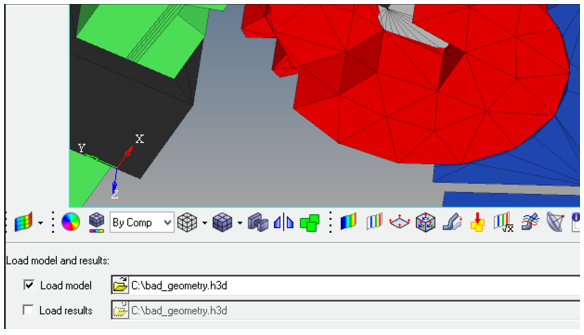
Figure 1. -
Go to .
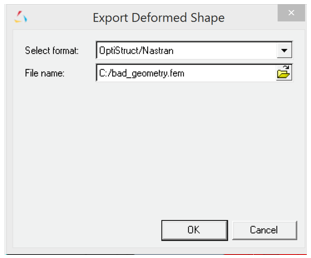
Figure 2. -
A confirmation dialog appears warning the user that this utility exports only
unscaled-coordinates. Click Yes.
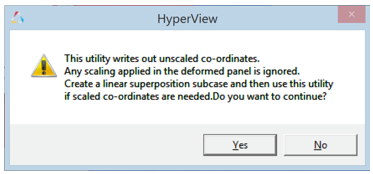
Figure 3. -
In MotionView invoke the Import CAD or
FE using HyperMesh utility and
select OptiStruct as Input
File format as shown below:

Figure 4.