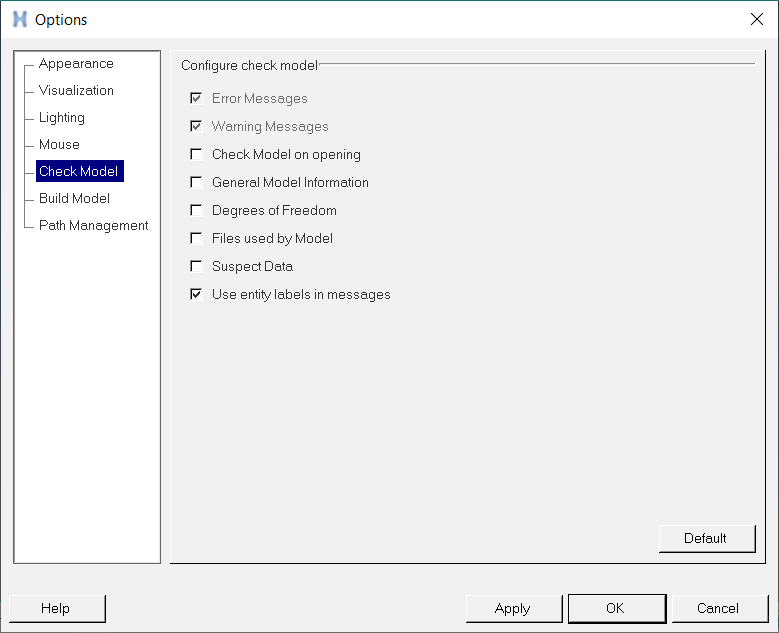
The Check Model options allow you to select which information from the model file will
be displayed when the Check Model tool is run.
To open this dialog, select Options from the Tools menu, and then
click Check Model on the tree. Figure 1. Options dialog – Check Model
Activate the check box next to one of the available options (listed below) to include this
information in the Check Model dialog (which is displayed after the
check of the model is completed). The information for each activated option will be
displayed in its own tab.
Option
Description
Check Model on opening
Checks the model immediately upon opening a model. When this check is off,
the model is not checked for errors upon opening.
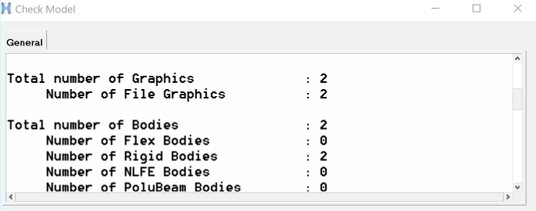
General Model Information
This option provides general information about the model. The information
contains the count of each type of entity apart from the number of inactive system
or analyses. Figure 2.
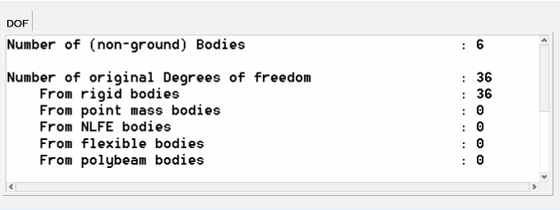
Degrees of Freedom
Provides degrees of freedom information. The total DOF is calculated by
including all DOFs contributed by bodies and subtracting DOFs removed by
constraints:
Model DOFs = DOFbodies -
DOFconstraints
Refer to the DOF tables below for details on
body and constraint DOF contribution. Figure 3.
Note: The DOF calculation does not consider redundant
constraints.
Files used by Model
This option lists the reference files that the model uses for flex bodies,
graphics and curves.
Suspect Data
This option captures possible suspect data that could cause problems during
solution. The suspect data could include:
Ratio between largest and smallest mass
Zero stiffness for SpringDamper
Free bodies
Use entity labels in messages
With this option turned on, the messages posted in the message log will refer
to MotionView entities by their label. Otherwise, the
message will refer to the entities by the variable names.
Note: The Error Message and Warning Messages options are
automatically displayed in the Message Log and will always be active, therefore these
options have been disabled in this dialog.