MotionSolve User Guide
MotionSolve is a system level, multi-body solver that is based on the principles of mechanics.
Given a multi-body system description, MotionSolve automatically formulates the equations of motion and numerically solves them. The results can then be plotted and animated to visualize the response of the system. Plotting is useful for examining detailed engineering calculations and animation is primarily used to visually evaluate the overall system behavior.
- Reduced product development time and cost.
- Improved quality.
- Reduced design and manufacturing risk.
- Accelerated product innovation.
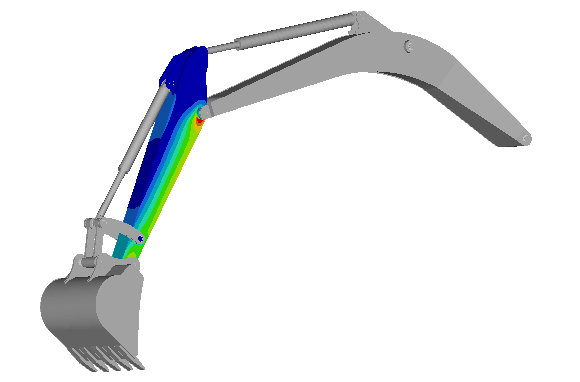
Figure 1. An excavator arm model as an example of a flexible multi-body system
MotionSolve is completely integrated into the Altair Simulation software framework, which allows it to share data with all Altair Simulation applications.
Below is a brief description of how Altair Simulation products can be used in conjunction with MotionSolve.
- MotionView
- MotionView is a graphical pre-processor that
enables you to create complex models that can be solved using MotionSolve.
Figure 2. - HyperGraph 2D
- HyperGraph 2D is a graphical post-processor that
enables you to create 2-D plots from MotionSolve results and
perform detailed engineering calculations on them.
Figure 3. - HyperGraph 3D
- HyperGraph 3D is a
graphical post-processor that enables you to create 3-D plots from MotionSolve results for visualizing system behavior.
Figure 4. - HyperView
- HyperView is a graphical post-processor that
enables you to animate MotionSolve results and evaluate
overall system behavior.
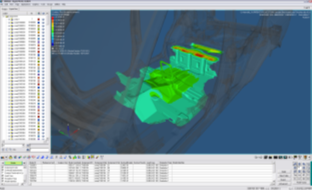
Figure 5. - HyperStudy
- HyperStudy not only enables you to gain insight
into your system model using Design of Experiments (DoE) techniques, but
also optimizes your model to achieve the desired performance. You can also
use stochastic analysis to assess the risk in your mechanism designs.
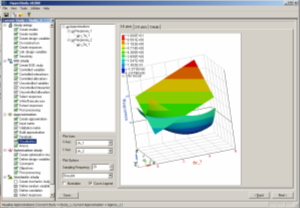
Figure 6. - OptiStruct
- OptiStruct, an FEA solver, lets you reduce
detailed finite element models into computationally efficient flexbody
representations using component mode synthesis (CMS) techniques. The
flexbodies can then be used in MotionSolve to capture part
compliances providing a significant accuracy improvement over rigid body
models.
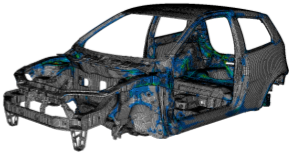
Figure 7. - HyperMesh
- HyperMesh is a graphical finite element
pre-processor that enables you to create rigid and flexible multi-body
models and solve them with MotionSolve. HyperMesh also helps you prepare finite element
models for flexbody body generation using OptiStruct. These flexbodies can then be used in
MotionSolve models.
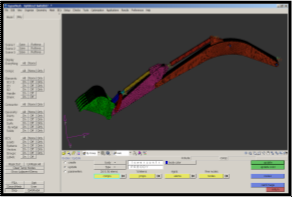
Figure 8.
MotionSolve and the Altair Simulation Framework
MotionSolve provides a comprehensive set of elements to help you model and simulate an almost infinite variety of mechanical and mechatronic systems. Some examples of modeling elements are rigid and flexible bodies, joints, such as revolute and universal, external forces, prescribed motions, sensors, and controllers. These elements can be combined to model systems such as vehicles, hard disk drives, aircrafts, satellites, and robots. These systems can be analyzed for various performance criteria, such as motion, mechanical advantage, power requirements, vibration, stability, loading, efforts, interference, penetration, stress distribution, durability, and controllability. Convenient access to such comprehensive system level information enables you to efficiently evaluate and rank different conceptual design candidates. You can then fine tune your designs using DoE and optimization and assess their robustness and associated risk using stochastic analysis.
Platforms
MotionSolve runs on the following platforms:
| Platform | Bits | Minimum System Requirement |
|---|---|---|
| Linux | 64-bit | RedHat Enterprise Linux 6.6 RedHat Enterprise Linux 7.2 SLES 12 SP2 |
| Windows | 64-bit | Windows 7/10 Windows Server 2008 R2 |
For more information on platform support for Altair Simulation, please see Platform Support.