Multistrand elements are n-node springs where matter is assumed to slide through the
nodes.
It could be used for belt modelization by taking nodes upon the dummy. Friction may be defined at
all or some nodes. When nodes are taken upon a dummy in order to modelize a belt, this allows
friction to be modelized between the belt and the dummy.
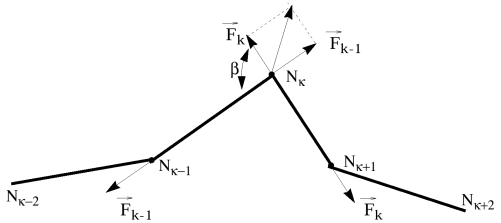
Internal Forces Computation
Figure 1. Internal Forces Computation
Nodes are numbered from 1 to , and strands are numbered from 1 to n-1 (strand goes from node Nk to node Nk+1).
Averaged Force
The averaged force in the multistrand is computed as:
Linear spring
Nonlinear spring
or, if function identifier is 0:(1)
or, if function identifier is 0:(2)
Where,
Engineering strain:
Reference length of element
Force into each Strand
The force into each strand is computed as:
Where, is computed an incremental way:(3)
with the length of the unconstrained strand , and .
Where, is the unitary vector from node Nk to node
Nk+1.
Friction is expressed at the nodes: if is the friction coefficient at node , the pulley friction at node Nk is expressed
as:(6)
When equation Equation 6 is not satisfied, is reset to .
All the (k=1, n-1) are modified in order to satisfy all conditions upon (k=2, n-1), plus the following condition on the force integral
along the multistrand element:(7)
This process could fail to satisfy Equation 6 after the modification, since no iteration is made. However, in such a case
one would expect the friction condition to be satisfied after a few time steps.
Note: Friction expressed upon strands (giving a friction coefficient along strand ) is related to pulley friction by adding a friction coefficient upon each nodes Nk and Nk+1.
Time Step
Stability of a multistrand element is expressed as:(8)