ACU-T:5201 AcuSolveとMotionSolveを使用したチェックバルブの連成シミュレーション
前提条件
このチュートリアルでは、HyperMesh Desktopを使用してAcuSolve - MotionSolve連成シミュレーションの設定手順を説明します。このチュートリアルを開始する前に、HyperWorks 入門チュートリアルである ACU-T:1000 HyperWorksユーザーインターフェースをすでに完了し、HyperMesh、AcuSolve、およびHyperViewの基本を理解しているものとします。このシミュレーションを実行するには、ライセンス供与済みバージョンのHyperMeshおよびAcuSolveにアクセスできる必要があります。
このチュートリアルを実行する前に、ここをクリックしてチュートリアルモデルをダウンロードしてください。 ACU-T5201_CheckValveCoupled.hm また、Valve_model.xmlを次のファイルから抽出します:をHyperMesh_tutorial_inputs.zipから抽出します。
HyperMeshデータベース(.hmファイル)には、メッシュ済みのジオメトリが含まれているため、このチュートリアルには、ジオメトリのインポートとメッシュ生成に関する手順は含まれません。
問題の説明

図 1. スプリング式シャッターがあるチェックバルブの図
管の入口直径は0.08mで、長さは0.4mです。チェックバルブのアセンブリは、入口の下流0.085mにあります。これは、中心に配置された直径0.044mの開口部と開口部から0.005m離れた初期位置にあるシャッターを備えた0.005m厚の薄板で構成されており、ほぼ閉じられた状態をシミュレートします。シャッター薄板の直径は0.05mで、厚みは0.005mです。シャッター薄板は、長さが0.03mで直径が0.01mのステムに接合されています。シャッターとステムの質量は0.2kgであり、その動きは剛性が2162N/mである仮想スプリングの影響を受けます。バルブシャッターの動きは、シャッターの下流にある穴あき薄板に取り付けられた止め具によって制限されます。
30度の部分として形状をモデル化するには、流体モデルが剛体モデルと一致するように設定される必要があります。剛体の1/12のみがモデル化されるため、AcuSolveによって計算されるバルブシャッターに作用する力は、装置にかかる実際の力の1/12に相当します。形状全体の小さな部分のみをモデル化しているという事実を説明する、スケーリングされた質量およびスプリング剛性の設定により、剛体力学モデルがMotionSolveで設定されています。MotionSolveでのこの問題の設定に関するその他の情報は、MotionSolveのドキュメントで示されています。
この問題で扱う流体は水であり、密度 (ρ)は1000 kg/m3、分子粘性 (μ)は1.781X 10-3です。
シミュレーションの開始時には、流れ場は静止しています。流れは、図 2に示す区分線形関数として経時変化する入口圧力によって引き起こされます。入口圧力が上昇するにつれて、バルブが開くため流れは加速されます。乱流粘性率は10と想定されています。
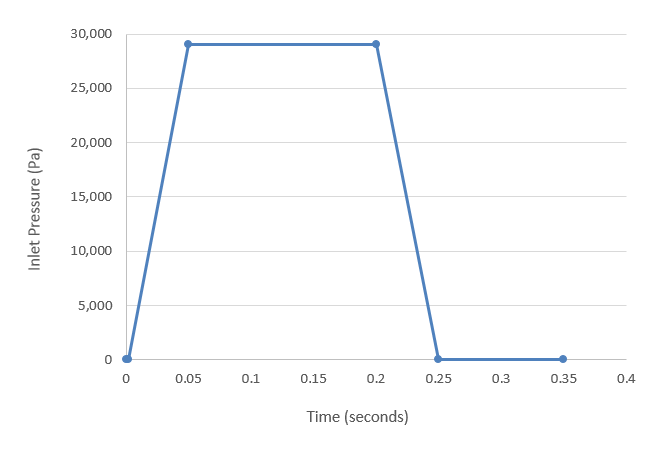
図 2. 入口の過渡圧力
前に行ったこの形状のシミュレーションでは、入口での平均速度が最大の0.98 m/sに達することが示されています。この速度では、流れのレイノルズ数は78,400となります。レイノルズ数が4,000より大きい場合は、一般に流れを乱流としてモデル化することができます。メッシュモーションは、任意のメッシュ移動(ALEメッシュモーション)を使用してモデル化されます。
このケースでは、対象となるこの過渡挙動は、過渡圧力プロファイルによって与えられている、圧力が上昇してから再び低下するのにかかる時間内に生じます。スプリングが元の状態に戻るための時間を見越して、追加の時間がシミュレートされます。このチュートリアルでは、圧力が降下して初期状態に戻った後に0.1秒が追加されるため、合計時間は0.35秒となります。
非定常解析において極めて重要なもう1つの決定事項は、時間増分の選択です。時間増分は、シミュレーションの指定された時間ステップにおける時間変化です。対象となる流動特性の変化を捕捉するのに十分な短さで、不要な計算時間がかからない時間増分を選択することが重要です。初期状態から最大値への入口圧力の変化は、0.048秒を超える時間にわたって発生します。時間増分が0.002秒の場合、過大な計算時間を必要とすることなく、優れた分解度でこの過渡変化を表すことができます。
HyperMeshモデルデータベースを開く
-
標準ツールバーのOpen Modelアイコン
 をクリックします。
Open Modelダイアログが開きます。
をクリックします。
Open Modelダイアログが開きます。
一般的なシミュレーションパラメータの設定
解析パラメータの設定
-
External codeをOnにします。
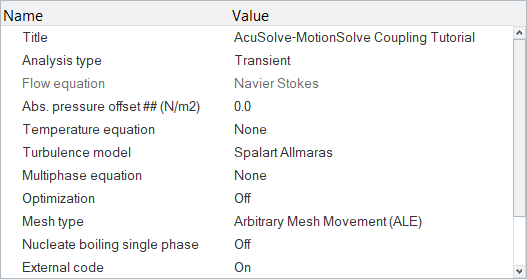
図 3.
ソルバー設定
-
External codeをOnにし、Flow、Turbulence、およびMeshオプションがオンに設定されていることを確認します。
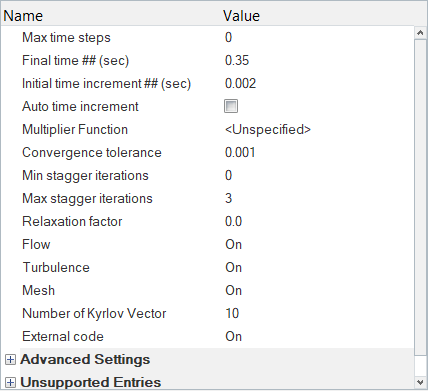
図 4.
MotionSolveとの通信のための外部コードパラメータの設定
-
Socket portとして48000と入力します。
これは、AcuSolveとMotionSolveとの通信に使用されるデフォルトポートです。
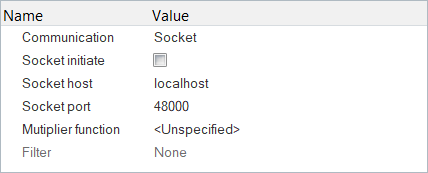
図 5.
節点出力頻度の定義
-
エンティティエディターで、Time step frequencyを1に設定します。
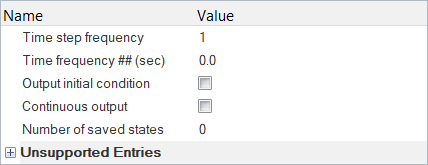
図 6.
境界条件の設定
入口圧力のMultiplier Functionの作成
-
Curve editorダイアログで、以下のXとYの値を入力します。
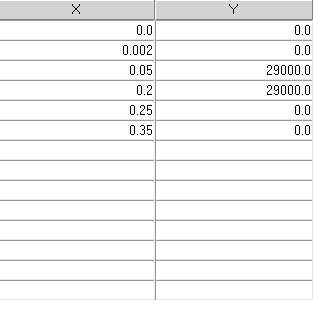
図 7. -
Curve fit variableがTime、Evaluation TypeがPer Time Stepに設定されていることを確認します。
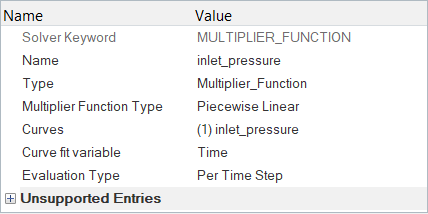
図 8.
境界条件の設定
-
Fluidをクリックします。エンティティエディターで以下を設定します。
- TypeをFLUIDに変更します。
- MaterialをWater_HMに設定します。
- 残りのデフォルトオプションはそのままにします。
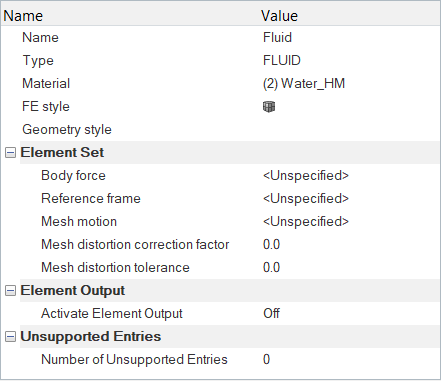
図 9. -
Inflowをクリックします。エンティティエディターで以下を設定します。
- TypeをINFLOWに変更します。
- Show advanced featuresをOnに設定します。
- Inflow typeをStagnation Pressureに変更します。
- Stagnation Pressureを1N/m2.に設定します。
- Stagnation Pressure multiplier functionをinlet_pressureに設定します。
- Turbulence input typeをViscosity Ratioに設定します。
- エンティティエディターの上部にあるMaterialをWater_HMに設定します。
- Turbulence viscosity ratioを10に設定します。
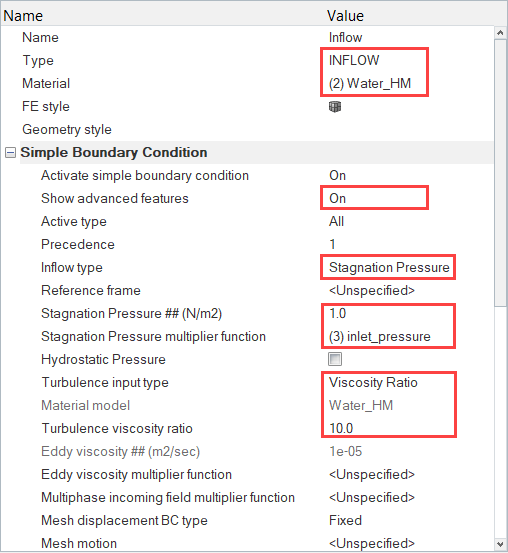
図 10. -
Outflowをクリックします。エンティティエディターで、TypeをOUTFLOWに変更します。
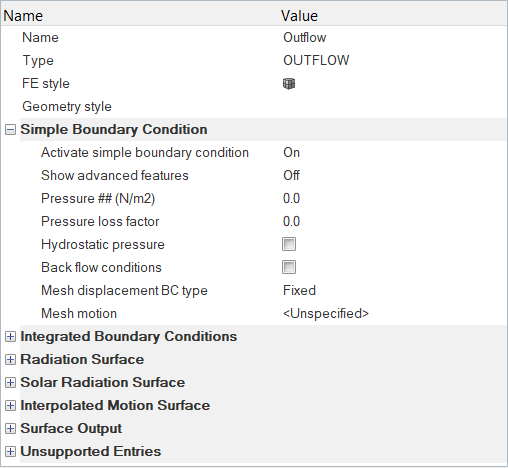
図 11. -
Valve_wallをクリックします。エンティティエディターで以下を設定します。
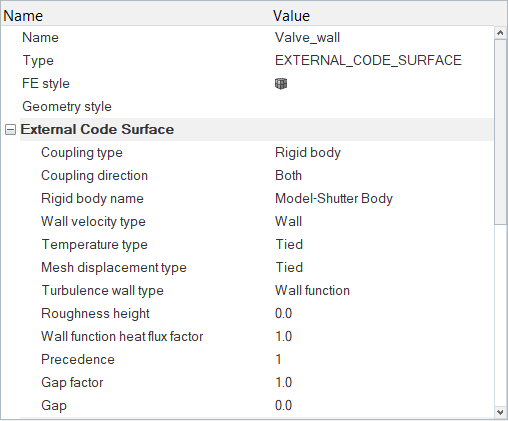
図 12. -
Outflowをクリックします。エンティティエディターで、TypeがWALLに設定されていることを確認します。
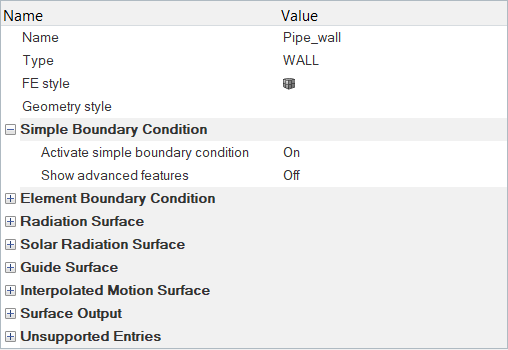
図 13. -
Front_symmetryをクリックします。エンティティエディターで以下を設定します。
- TypeをSYMMETRYに変更します。
- Mesh displacement BC typeをSlipに変更します。
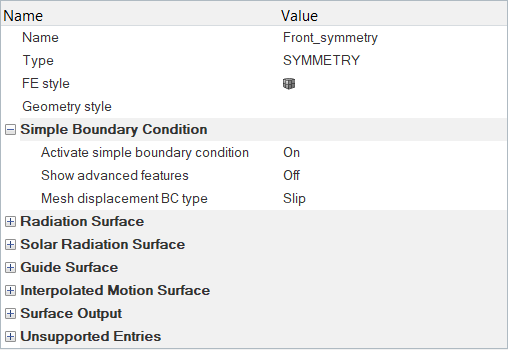
図 14.
解析計算
- AcuSolveの起動
- MotionSolveの起動
次の一連の手順では、これら2つのタスクについて説明します。
AcuSolveの実行
この手順では、AcuSolveを起動してこのケースの解を計算します。
- ACUツールバーの
 をクリックします。 Solver job Launcherダイアログが開きます。
をクリックします。 Solver job Launcherダイアログが開きます。 - 他のオプションはデフォルト設定のままにし、Launchをクリックして解析プロセスを開始します。
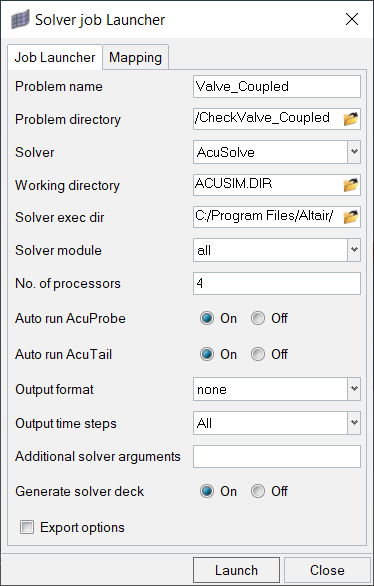
図 15.
MotionSolveの実行
-
Input file(s)欄の横の
 をクリックして、Valve_model.xmlを保存した場所に移動し、このファイルを開きます。
をクリックして、Valve_model.xmlを保存した場所に移動し、このファイルを開きます。
-
 をクリックしてAvailable Optionsダイアログを開きます。
をクリックしてAvailable Optionsダイアログを開きます。
-
MotionSolveとAcuSolveとの連成を示すよう-as_cosimオプションを有効にします。
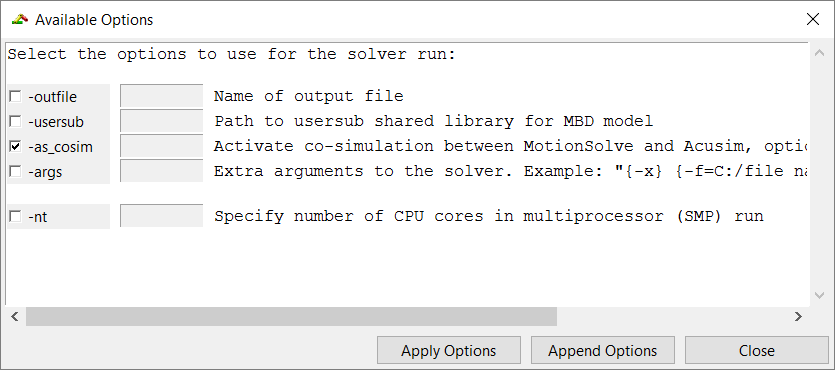
図 16. -
RunをクリックしてMotionSolveを起動します。
解析が進行すると、HyperWorks Solver Viewウィンドウが開きます。解析の進行状況はこのウィンドウで報告されます。AcuSolve AcuTailウィンドウも解析の進行に合わせて更新されます。
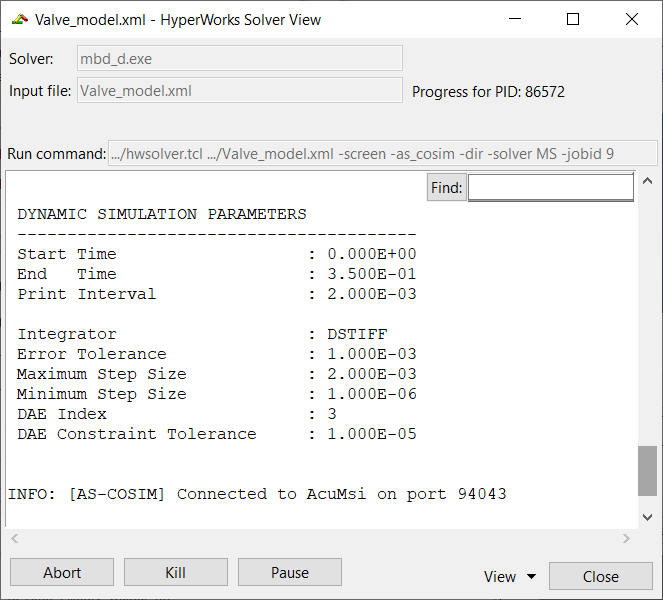
図 17.
HyperGraphによる解析のモニター
-
グラフィックス領域の左下隅にあるクライアントセレクターをクリックし、HyperGraph 2Dを選択します。
図 18. -
HyperGraphインターフェースが読み込まれたら、パネル領域のをクリックして、使用中の作業ディレクトリから結果ファイルを選択します。
この例で選択するファイルは、Valve_Coupled.1.Logです。
-
Y Componentにpressureを選択します。

図 19. -
Applyをクリックします。
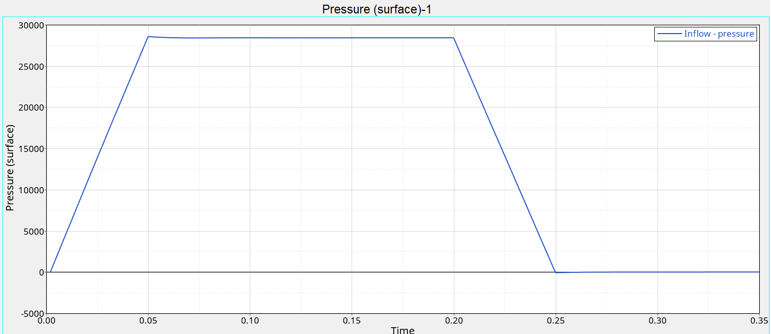
図 20. -
Applyをクリックします。
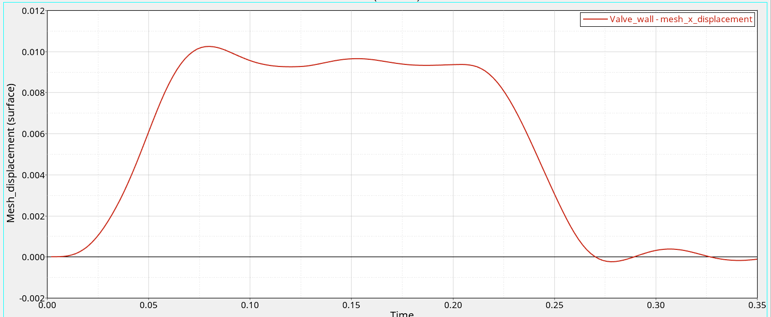
図 21.
HyperViewによる結果のポスト処理
この手順では、水がバルブを通過して流れる際のバルブの動きのアニメーションを作成します。ソルバーの実行が完了したらAcuProbeウィンドウとAcuTailウィンドウを閉じます。HyperMesh Desktopウィンドウで、AcuSolve Controlタブを閉じ、モデルを保存します。
HyperViewインターフェースへの切り替えとAcuSolveモデルと結果の読み込み
-
HyperMesh Desktopウィンドウで、グラフィックスウィンドウの左下隅のClientSelectorドロップダウンをクリックします。
図 22. -
Load model and resultsパネルで、Load modelの隣にある
 をクリックします。
をクリックします。
速度のアニメーションの作成
-
Resultsブラウザで、Componentsリストを展開表示し、Isolate
Shownアイコン
 をクリックします。
をクリックします。
-
Front_symmetryコンポーネントをクリックして、前方対称面を除くすべてのコンポーネントの表示をオフにします。
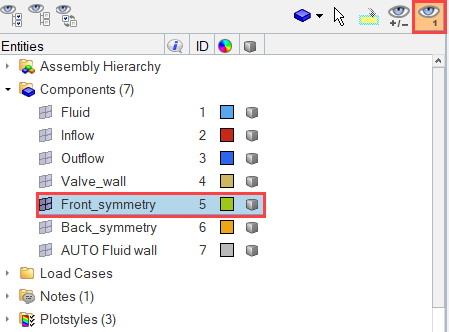
図 23. - Standard Viewsツールバーの
 をクリックすることで、xy平面を正面から見た表示にします。
をクリックすることで、xy平面を正面から見た表示にします。 -
Resultsツールバーで
 をクリックしてContourパネルを開きます。
をクリックしてContourパネルを開きます。
-
パネル領域のDisplayタブで、Discrete colorオプションをオフにします。
図 24. -
Edit Legendダイアログで、TypeをDynamic scaleに、Numeric formatをFixedに変更し、OKをクリックします。
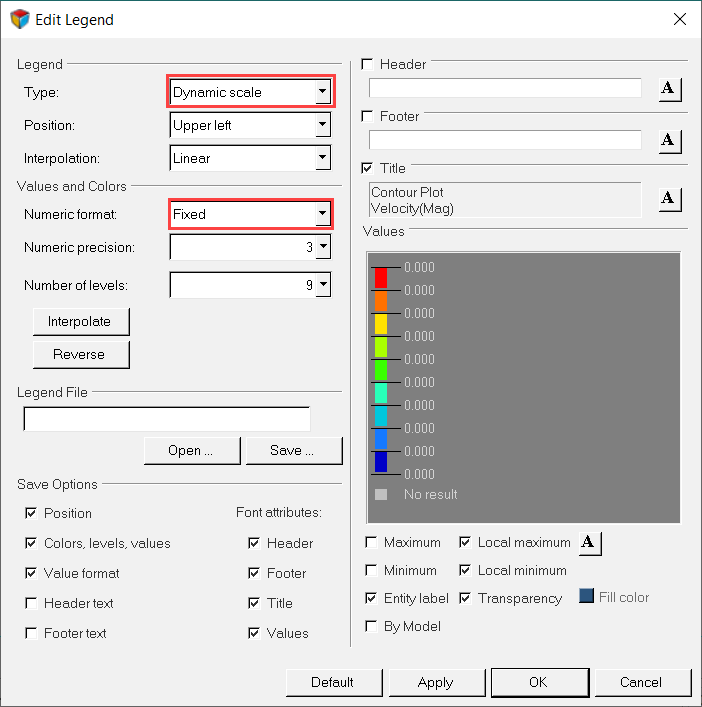
図 25. -
Animationツールバーで
 をクリックし、前方対称面上の速度アニメーションを再生します。
をクリックし、前方対称面上の速度アニメーションを再生します。
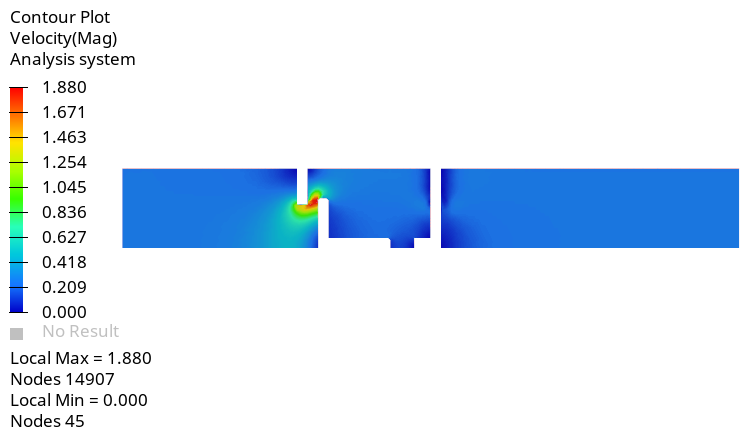
図 26. -
ImageCaptureツールバーから、Capture Graphics Area
Videoアイコン
 をクリックします。
をクリックします。
切断面での圧力と速度のコンターの表示
-
Resultsブラウザで、Fluidコンポーネントを除くすべてのコンポーネントの表示をオフにします。
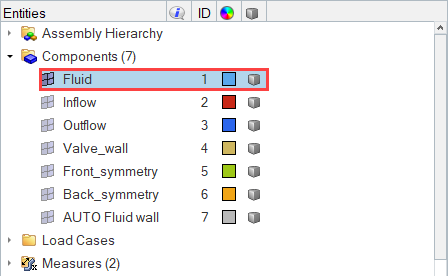
図 27. -
ResultsツールバーでをクリックしてContourパネルを開きます。
-
パネル領域で、ResultタブのOverlay result
displayチェックボックスを有効にします(有効でない場合)。
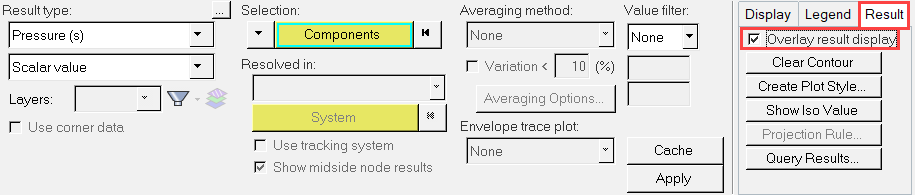
図 28. -
HV-DisplayツールバーのSection cut アイコン
 をクリックします。
をクリックします。
-
Gridlineをクリックします。Gridline Optionsダイアログで、Grid lineの下のShowチェックボックスを非アクティブにして、OKをクリックします。

図 29. -
Resultsツールバーで
 をクリックしてVectorパネルを開きます。
をクリックしてVectorパネルを開きます。
-
Selectionドロップダウンをクリックし、オプションリストからSectionsを選択します。
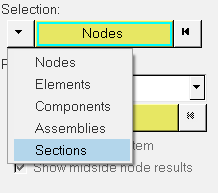
図 30. -
Color byオプションをDirectionに設定して、X+Y+Zの色をWhiteに設定します。
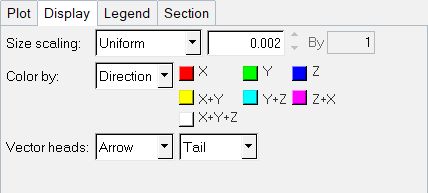
図 31. -
Sectionタブに移動して、Projectedチェックボックスをアクティブにし、Applyをクリックします。
次の図に示すようにベクトルプロットが表示されます。
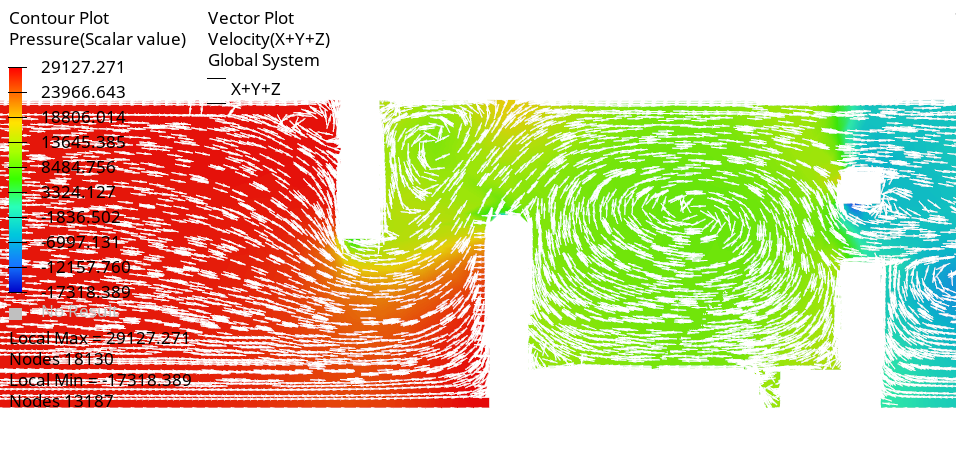
図 32.0.156秒における結果が表示されています。
要約
このチュートリアルでは、AcuSolveとMotionSolveを使用した連成シミュレーションを設定するための基本的なワークフローを知ることができました。ここでは、HyperMesh Desktopを使用してAcuSolveとMotionSolve間の外部コード通信を設定してシミュレーションを実行し、HyperViewを使用してその結果をポスト処理する手順を紹介しました。また、断面上の既存のコンタープロット上にベクトルプロットを作成する方法も知ることができました。